Mọi ý kiến đóng góp xin gửi vào hòm thư: [email protected]
Kéo xuống để Tải ngay đề cương bản PDF đầy đủ: Sau “mục lục” và “bản xem trước”
(Nếu là đề cương nhiều công thức nên mọi người nên tải về để xem tránh mất công thức)
Đề cương liên quan:Bài tập lớn Kế hoạch khởi sự doanh nghiệp Thành lập công ty vận tải song trường với dòng sản phẩm là dịch vụ vận tải hàng hóa đông lạnh
[toc]
[pdfviewer width=”800px” height=”1000px” beta=”true/false”]http://hotroontap.com/wp-content/uploads/2019/04/B%C3%A0i-t%E1%BA%ADp-l%E1%BB%9Bn-K%E1%BB%B9-thu%E1%BA%ADt-h%E1%BB%87-th%E1%BB%91ng-trong-C%C3%B4ng-ngh%E1%BB%87-h%C3%B3a-h%E1%BB%8Dc-Ph%C3%A2n-t%C3%ADch-v%C3%A0-t%E1%BB%95ng-h%E1%BB%A3p-h%E1%BB%87-th%E1%BB%91ng-c%C3%B4ng-ngh%E1%BB%87-h%C3%B3a-h%E1%BB%8Dc-tr%C3%AAn-c%C6%A1-s%E1%BB%9F-nhi%E1%BB%87t-%C4%91%E1%BB%99ng-h%E1%BB%8Dc-Exergy.pdf[/pdfviewer]
Tải ngay đề cương bản PDF tại đây: Bài tập lớn Kỹ thuật hệ thống trong Công nghệ hóa học Phân tích và tổng hợp hệ thống công nghệ hóa học trên cơ sở nhiệt động học (Exergy)
Bài tập lớn Kỹ thuật hệ thống trong Công nghệ hóa học: Phân tích và tổng hợp hệ thống công nghệ hóa học trên cơ sở nhiệt động học (Exergy)
1. Giới thiệu
Ngành công nghiệp xi măng là một ngành tiêu hao rất nhiều năng lượng. Để sản xuất ra một tấn clinker theo công nghệ lò nung tiên tiến phải tiêu tốn 730.000-800.000 kcal tương đương với 110-120kg than tiêu chuẩn, đồng thời thải ra ngoài không khí lương khí thải rất lớn, khoảng 2500-2800 m3 ở nhiệt độ từ 350-380oC với nồng độ bụi trung bình 50mg/Nm3 gây hiệu ứng nhà kính, ô nhiễm môi trường. Vì vậy cần phải tối ưu hóa hoặc thiết kế lại quá trình này để nâng cao hiệu quả của nó.
Năng lượng đưa vào quá trình khá cao, lên tới 3.22GJ/t nên việc tiến hành phân tích exergy là một quá trình quan trọng. Theo đánh giá của OECD năm 2000 thì giá trị thực nghiệm tốt nhất trong khoảng 2.9-3.2 GJ/t. So với giá trị tính toán được thì khá là phù hợp. Trong hầu hết các đơn vị sản xuất xi măng, chi phí năng lượng chiếm hơn 25 % tổng chi phí sản xuất. Các khái niệm về exergy là rất hữu ích trong việc xác định công việc mà phải được cung cấp cho hệ thống để loại bỏ nó từ trạng thái cân bằng. Exergy cũng có thể trở thành một thước đo của công việc tối thiểu cần thiết để sản xuất hàng hóa và có thể được sử dụng để đánh giá chuyển đổi và sử dụng năng lượng cho các hệ thống sản xuất và nền kinh tế quốc gia.
2. Mô tả hệ thống
Hệ thống công nghệ có các operator công nghệ chính như operator công nghệ trộn để trộn nguyên liệu than và đất sét, thạch cao và phụ gia. Operator biến đổi hóa học như các thiết bị nung clinker…và nhiều operator công nghệ khác.
Sản xuất xi măng bao gồm các giai đoạn sau:
- Khai thác và vận chuyển đá vôi:
Đá vôi được khai thác theo phương pháp cắt tầng bằng nổ mìn sau đó dùng xe ủi hạng lớn ủi xuống chân núi, dưới chân núi máy xúc công suất lớn xúc đá lên xe tải, băng tải xích chuyển về máy đập đá. Đá sau đập có kích thước cực đại cỡ 15 mm, Qua hệ thống băng tải cao su vận chuyển vào cầu rải (cầu rải có khả năng tịnh tiến đồng thời ngang và dọc). Đồng thời với quá trình này thì đá vôi được vận chuyển về kho đồng nhất sơ bộ.
- Công đoạn dập và vận chuyển đá sét
Cũng như đá vôi đá sét có kích thước nhỏ hơn 1000mm được máy xúc đổ lên xe Koockum tự đổ vận chuyển vào phễu tiếp liệu, nhờ băng tải xích đá sét đi vào máy đập kiểu va đập đàn hồi, đập sơ bộ xuống cỡ nhỏ hơn 75mm. Sau đó đá sét được băng tải cao su vận chuyển tới máy cán hai trục để đập lần 2 xuống kích thước còn nhỏ hơn 25mm. Sau khi cán đá sét được hệ thống băng tải cao su vận chuyển về kho đồng nhất sơ bộ.
- Kho đồng nhất sơ bộ
Đá vôi và đá sét được xếp vào kho thành 2 đống mỗi loại, và đổ vào kho bằng 4 cầu rải. Cầu sẽ rải liệu thành từng luống ở cả lượt đi và lượt về (có từ 8 đến 29 luống). ở đây cũng có 2 hệ thống gầu xúc, khoảng 20 gầu, dùng để xúc liệu từ kho đồng nhất lên hệ thống cân định lượng tự động Đôsimat, định đúng khối lượng cần thiết theo tỉ lệ cân từ băng tải chung chuyển đá tới cổ tiếp liệu cho máy sấy nghiền nguyên liệu.
Nguyên tắc làm việc của kho là khi đống này được đổ thì đống kia đang được xúc.
- Công đoạn nghiền liệu
Liệu sau khi đồng nhất sơ bộ được đưa vào máy nghiền nguyên liệu, đồng thời với quá trình này, xỉ cũng được tháo ra từ các kết quả cân định lượng đổ vào băng tải chung và cùng đổ vào cổ tiếp liệu và vào máy sấy nghiền. Liệu được nghiền bằng máy nghiền bi. Liệu từ máy nghiền, qua gầu nâng lên hệ thống phân ly để sàng, những hạt không đạt yêu cầu đưa trở về máy nghiền qua cân hồi lưu. Còn những hạt qua sàng có độ mịn đạt yêu cầu thì được không khí thổi lên silô lắng.
- Công đoạn đồng nhất liệu
Liệu ở cyclone lắng được tháo vào si lô theo kiểu tháo chéo (đây cũng là một bước sơ bộ nữa). Silô gồm 2 tầng, đáy silô có hệ thống máy nén khí – sục khí vào trong silô để đồng nhất phối liệu và tạo sự linh động cho phối liệu khi tháo sẽ dễ dàng. Khi khởi động công đoạn này một trong hai silô đã được nạp đến một nửa. Sau đó liệu được nạp vào từng silô theo những khoảng thời gian đặt trước. Khi liệu đã được điền đầy một trong hai silô thì tháo từ silô đầy xuống silô chứa bên dưới theo nguyên tắc silô đang tháo sẽ không được nạp còn silô đang nạp sẽ không được tháo. Mỗi silô đều có các thiết bị đo mức và báo mức đầy đên trung tâm điều khiển về tình trạng của tầng silô.
- Công đoạn nung Clinker
Trước khi liệu đưa vào lò nung, phải qua tháp sấy 5 tầng. Với tháp sấy 5 tầng gồm 5 silô đồng nhất, mỗi sillo được chia thành 2 tầng: tầng 1 dùng để đồng nhất tầng 2 dùng để chứa bột liệu. Liệu có thể được tháo từ tầng1 của Silo thứ nhất sang tầng 2 của Silo thứ 2 hoặc có thể tháo trực tiếp xuống tầng 1 của silô đó. Liệu được sấy sơ bộ đến gần 1000 C trước khi đi vào lò nung.
Nhiên liệu để nung là bột than đựoc phun ở áp suất cao dưới dạng mù. Dòng khí nóng đi ngược từ đáy lò đến đỉnh lò. Liệu từ két chứa được đi xuống, liệu đi vào lò nhiệt độ tăng dần làm các phản ứng pha rắn xảy ra và được kết khối ở 1300 C đến 1450 C tạo thành Clinker.
- Công đoạn vận chuyển Clinker
Clinker ra khỏi lò có nhiệt độ khá cao được làm nguội qua hệ thống làm mát đến nhiệt độ khoảng 120 C.
Đối với dây truyền 1: Hệ thống làm mát là các hệ thống lò quay con
Đối với dây truyền 2 : Hệ thống làm mát là bằng hệ thống giàn ghi.
Clinker được ủ từ 7 đến 15 ngày trước khi tháo cùng phụ gia + thạch cao vào máy nghiền xi măng.
- Công đoạn nghiền xi măng
Clinker, thạch cao và phụ gia sau khi đồng nhất được cho vào máy nghiền xi măng để tạo ra sản phẩm xi măng. Thành phần Clinker , thạch cao, phụ gia được điều chỉnh để đạt được chất lượng xi măng theo yêu cầu. Máy nghiền xi măng là máy nghiền kiểu bi đạn. Để đảm bảo nhiệt độ của xi măng, trong khi nghiền nước được phun vào dưới dạng sương mù ở áp suất cao.
Xi măng ra khỏi máy nghiền được đưa qua hệ thống phân ly. Tại đây có sự sàng lọc. Nếu hạt xi măng quá to thì được thu hồi trở lại đầu máy nghiền. Nếu xi măng đạt tiêu chuẩn thì được đưa về kho chứa. Nếu xi măng quá nhỏ thì được thu hồi bởi hệ thống lọc bụi.
- Công đoạn đóng bao
Xi măng từ Silô chứa được vận chuyển bằng vít tải, gầu xúc và băng tải tới phân xưởng đóng bao. Tại đây có 5 Silô chứa, ở các Silô chứa này xi măng được sục liên tục nhờ các máy nén khí để đồng nhất lần cuối trước khi đưa đến các máy đóng bao hoặc đưa đến cầu cảng để xuất xi măng rời.
3. Phân tích Exergy trong sản xuất xi măng
3.1. Phương trình được sử dụng trong phân tích exergy trên hệ thống sản xuất xi măng và bê tông
Định lượng dòng đầu vào và đầu ra sẽ dẫn đến rất nhiều thông số kỹ thuật để phan tích exergetic. Các yếu tố đầu vào (nguyên liệu và năng lượng) và đầu ra (khi thải) để sản xuất 1 tấn xi măng được rất sẽ minh họa trong hinh 2.
Lượng đầu vào của cac nhiên liệu khác nhau được chỉ ra rất rõ trong hình, cũng bao gồm đầu vào và đầu ra cho qua trinh sản xuất bê tông. Năng lượng đầu vào ở các dạng khác nhau. Nhiên liệu rắn, chủ yếu là than đá đóng góp 57,6%, đóng vai trò là nguồn năng lượng cung cấp lớn nhất. Nhiên liệu lỏng, dầu nặng và dầu diesel chiếm 35,95%.Trong khi điện và khí propan tạo thành hai loại nhiên liệu khác tương ứng với 6,42% và 0,002%.
Một phần của dầu nhiên liệu nặng được sử dụng để gia nhiệt trước cho lò nung, trong khi phần còn lại được sử dụng cho nhu cầu về nhiệt trong nhà máy.Các động cơ diesel được sử dụng cho việc vận chuyển nguyên vật liệu và các nhiên liệu khác,Ngoài ra, điện được sử dụng cho hoạt động của các bộ phận điện tử của nhà máy.Chẳng hạn như để vận chuyển, và propan được sử dụng trong quá trình sản xuất clinker.Tiêu thụ năng lượng lớn nhất trong hệ thống là quá trình sản xuất clinker, chiếm tới 59,6% tổng nhu cầu năng lượng. Đây là một kết quả mong đợi kể từ khi nâng nhiệt độ clinker lên 1450 độ C. Phần còn lại của năng lượng được dùng cho các đơn vị còn lại trong nhà máy sản xuất.
Định nghĩa Exergy:ta chỉ có thể biến đổi 1 phần của năng lượng nhiệt thành công trong quá trình thuận nghịch,và Exergy(j/kg) là năng lượng mà có thể biến đổi hoàn toàn thành công trong quá trình thuận nghịch
Biểu thức toán học:
Trong đó: U là năng lượng nội bộ
P là áp suất
T là nhiệt độ
S là entropy
i là thế hóa học
và ni là số mol của cấu tử i
Exergy có trong một hệ thống tại một điều kiện nhất định là công hữu ích tối đa có thể thu được từ hệ thống. công thực hiện trong một quá trình phụ thuộc vào trạng thái ban đầu, trạng thái cuối cùng, và vào quá trình.
Trong phân tích exergy, trạng thái ban đầu được xác định, và do đó nó không phải là một biến.
Exergy của các vật liệu khác nhau được cho trước, sự cân bằng exergy của quá trình trở thành phương tiện trong việc tính toán mất mát exergy và hiệu suất exergy của quá trình. Sự cân bằng exergy có thể được mô tả (hình 3) theo phương trình:
Tổn thất exergy chủ yếu do quá trình là không thuận nghịch và exergy trong chất thải bao gồm: chất thải rắn và lỏng, và khí thải.
Exergy hữu ích là exergy của sản phẩm. Điều này có thể được tính từ phương trình cân bằng exergy:
Hiệu quả của quá trình được xác định từ % của exergy hữu ích trên tổng số exergy đầu vào:
% tổn thất exergy, được định nghĩa như năng lượng và có thể được tính như sau:
Trong sản xuất xi măng coi như chỉ có một sản phẩm duy nhất nên phương trình này có thể được áp dụng.
Exergy vật lý của một dòng nhất định được đưa ra bởi các phương trình sau:
Nếu nhiệt của dòng được biết đến là Cp (T) thì phương trình sau đây được sử dụng:
Mix exergy: các exergy trộn của một dòng khí nơi mà tất cả các thành phần của nó có thể được coi là khí lý tưởng được đưa ra bởi các phương trình (Koroneos et al, 2003.):
Exergy trộn của khí đốt có các thành phần dễ cháy có thể cho bởi phương trình sau đây:
Exergy hóa học: exergy hóa học của chất là tối đa, công hữu ích có thể được sinh ra bởi quá trình cân bằng vật lý và hóa học của chất với môi trường xung quanh. Exergy hóa học của chất có thể tính bằng phương trình sau đây:
Exergy hóa học của các chất tham gia vào phản ứng :
có liên quan đến năng lượng tự do Gibbs của phản ứng bởi phương trình:
Exergy hóa học của các chất được cho trong bảng và exergy hóa học của một dòng khí với N thành phần được đưa ra:
Tổng exergy của một dòng là:
Exergy nhiệt:
Hiệu suất exergy :
Định lượng dòng đầu vào và đầu ra sẽ dẫn đến rất nhiều thông số kỹ thuật để phan tích exergetic. Các yếu tố đầu vào (nguyên liệu và năng lượng) và đầu ra (khi thải) để sản xuất 1 tấn xi măng được rất sẽ minh họa trong hinh 2.
Lượng đầu vào của cac nhien liệu khác nhau được chỉ ra rất rõ trong hình, cũng bao gồm đầu vào và đầu ra cho qua trinh sản xuất bê tông. Năng lượng đầu vào ở các dạng khác nhau. Nhiên liệu rắn, chủ yếu là than đá đóng góp 57,6%, đóng vai trò là nguồn năng lượng cung cấp lớn nhất. Nhiên liệu lỏng, dầu nặng và dầu diesel chiếm 35,95%.Trong khi điện và khí propan tạo thành hai loại nhiên liệu khác tương ứng với 6,42% và 0,002%.
Một phần của dầu nhiên liệu nặng được sử dụng để gia nhiệt trước cho lò nung, trong khi phần còn lại được sử dụng cho nhu cầu về nhiệt trong nhà máy.Các động cơ diesel được sử dụng cho việc vận chuyển nguyên vật liệu và các nhiên liệu khác,Ngoài ra, điện được sử dụng cho hoạt động của các bộ phận điện tử của nhà máy.Chẳng hạn như để vận chuyển, và propan được sử dụng trong quá trình sản xuất clinker.Tiêu thụ năng lượng lớn nhất trong hệ thống là quá trình sản xuất clinker, chiếm tới 59,6% tổng nhu cầu năng lượng. Đây là một kết quả mong đợi kể từ khi nâng nhiệt độ clinker lên 1450 độ C. Phần còn lại của năng lượng được dùng cho các đơn vị còn lại trong nhà máy sản xuất.
3.2. Exergy hóa học của quá trình nung
Nguyên liệu đầu vào cho lò nung có chứa 75% đá vôi, 25% thạch diệp anh.
Phản ứng hóa học xảy ra trong quá trình nung :
Thành phần của sản phẩm thu được sau quá trình nung có trong bảng sau:
Lượng năng lượng cần thiết cho quá trình nung và lượng exergy tích lũy trong mỗi kg clinker được tính như sau:
Như vậy, với phần năng lượng cung cấp cho quá trình nung, chỉ có khoảng 73,2% là có thể sinh công. Phần năng lượng còn lại do làm nóng thiết bị, làm nóng nguyên liệu và mất mát ra ngoài môi trường.
3.3. Exergy hóa học của nhiên liệu.
Quá trình nung clinker là quá trình tiêu tốn nhiều năng lượng nhất trong toàn bộ dây chuyền sản xuất xi măng, chiếm tới 59.6% tổng nhu cầu năng lượng. Nhiên liệu cho quá trình nung clinker chủ yếu là than cốc và dầu FO nặng. Propan chiếm tỉ lệ rất nhỏ.Thành phần của các loại nhiên liệu được cho trong bảng dưới đây:
Exergy hóa học của nhiên liệu được tính như sau:
Đối với than cốc:
Đối với dầu FO nặng:
Trong đó:
xH, xC, xO, xN, xS: phần khối lượng của các nguyên tố H, C, O, N có trong nhiên liệu.
Kết quả tính toán được cho trong bảng sau:
Hiệu quả của quá trình được xác định từ % của exergy hữu ích trên tổng số exergy đầu vào:
Tổn thất exergy, được định nghĩa như năng lượng và có thể được tính như sau:
Dựa trên kết quả tính toán theo bảng số liệu trên, hiệu quả của quá trình đạt 50.2%.
Như vậy, điều này hoàn toàn tuân theo nguyên lí thứ II của nhiệt động học: Công có thể biến đổi hoàn toàn thành nhiệt, nhưng nhiệt không thể biến đổi thành công.
4. Exergy và tổn thất năng lượng
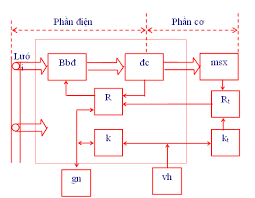
Sơ đồ dòng của quá trình sản xuất clinker với các dòng nhiệt được mô tả chính xác trong hình 4. Việc đánh giá các giá trị của năng lượng và năng lượng được sử dụng trong hệ thống được thực hiện qua sự phân tích dòng vào và dòng ra. Năng lượng đầu vào và exergy của các dòng khác nhau của quá trình sản xuất clinker tính trên mỗi kg clinker sản xuất ra được thể hiện trong bảng 4. Dựa theo bảng 4, có thể xây dựng sơ đồ Sankey biểu diễn năng lượng và exergy. Các sơ đồ (hình 5 và hình 6) là một ví dụ điển hình của exergy và cân bằng entanpy và của exergy hữu ích hay mất mát trong quá trình . ta có thể thấy rằng có khoảng 68.5% năng lượng là hữu ích cho hệ thống. giá trị này đại diện cho 50% exergy hữu ích và 50% exergy còn lại là tổn thất exergy ở các giai đoạn khác nhau của hệ thống. tổn thất lớn nhất (30.9% ) là do tính chất bất thuận nghịch trong gia nhiệt trước của dòng vào và làm mát của dòng sản phẩm. khí thải của các quá trình đốt cháy nguyên liệu gây ra rò rỉ khoảng 15.1% exergy.
Tóm tắt quá trình:
Nguyên liệu thô là đá có 75% là đá vôi và 20% diệp thạch đưa vào tháp nung, khí thái quá trình nung được thải ra ở đỉnh tháp. Đáy tháp là lò nung được cung cấp không khí từ bộ phận làm nguội bằng không khí ở đáy tháp và than đá (pet-coke) cung cấp nhiệt chung cho cả lò nung và lò quay. Đi ra khỏi đáy lò nung là dòng nguyên liệu khô đi vào lò quay. Không khí đưa vào lò, làm mát được đưa từ môi trường xung quanh vào. Clinker ra lò được làm lạnh bởi không khí.
5. Các phương pháp giảm mất mát exergy
Ta có:
Công W được tiêu thụ có thể tính được dựa vào sự khác nhau giữa Exergy tại nhiệt độ đầu vào T1 và tại nhiệt độ đầu ra T2 của nguồn nhiệt:
W = E1 – E2 = QT0( )
ở đây E1, E2 là exergy tại nhiệt độ đầu vào và đầu ra của nguồn nhiệt
Như vậy năng lượng W cần thiết cho quá trình không những phụ thuộc vào nhiệt lượng Q mà còn phụ thuộc vào mức nhiệt độ T1 và T2.
Hiệu số nhiệt độ T1 – T2 thường bé trong tính toán nên mất mát exergy thường là nhỏ. Tuy nhiên trong quá trình thực tế, lượng nhiệt cấp cho qua trình thường có dòng nhiệt có nhiệt độ Tvào>T1 và lượng nhiệt lấy đi trong thiết bịlàm nguội thường có nhiệt độ Tra<T2, vì vậy một lượng exergy lớn hơn so với nhu cầu của thiết bị mất đi trong quá trình diễn ra phản ứng.
Các giải pháp tiết kiệm năng lượng trong quá trình hóa học nhằm giảm lượng nhiệt cấp cho quá trình Qvào và giảm đến mức có thể hiệu số nhiệt độ T1 – T2 của dòng nhiệt vào và dòng nhiệt ra.
Có 3 phương pháp chủ yếu để giảm mất mát exergy:
- Để giảm mất mát khả năng chuyển đổi từ nhiệt sang công trong các thiết bị phản ứng thường đặt thiết bị làm nóng và làm lạnh trung gian. Đương nhiên giải pháp này không giảm được lượng nhiệt cần cấp cho quá trình nhưng một phần lượng nhiệt này được cấp tại nhiệt độ thấp hơn và được lấy đi tại nhiệt độ cao hơn vì vậy sẽ làm giảm đi phần mất mát exergy. Phương pháp này chỉ có lợi thế khi các nguồn nhiệt có nhiệt độ khác nhau, hoặc có nhiều đối tượng sử dụng nhiệt khác nhau hoặc có thể kết nối giữa các phần tử trong hệ thống.
- Mất mát exergy cũng có thể được giảm bằng cách sử dụng nhiệt thải ở đỉnh tháp để tạo ra dòng hơi có áp suất thấp cung cấp cho các quá trình khác hoặc sủa dụng dòng nhiệt thải này để gia nhiệt cho dòng nguyên liệu đầu vào.
- Phương pháp sử dụng bơm nhiệt hay tuần hoàn nhiệt cũng thường hay được áp dụng. dòng nhiệt của dòng sản phẩm đỉnh tháp hay đáy tháp sẽ được sử dụng để làm chất công tác cho bơm. Thực chất đây là quá trình sử dụng năng lượng tuần hoàn.
Trong hệ thống sản xuất xi măng (hình 4) ta thấy người ta cũng ứng dụng những nguyên tắc tận dụng năng lượng để giảm mất mát exergy trong hệ thống.
- Ở lò nung, khí thải ở phần nung của lò nung được sử dụng để gia nhiệt cho dòng nguyên liệu thô đi vào tháp, sau đó dòng khí này mới được thải ra ngoài sau khi đã tận dụng nhiệt để gia nhiệt cho nguyên liệu đầu.
- Trong phần phía dưới của lò nung, than đá được cung cấp vào một phần để làm nóng nguyên liệu, một phần là để nung nguyên liệu đá vôi thành vôi sống, cung cấp nhiệt cho nguyên liệu để quá trình chuyển hóa diễn ra hoàn toàn, giảm bớt được phần lớn năng lượng cung cấp cho lò quay.
Phía cuối lò quay, linker được làm mát bằng không khí ngoài trời đưa vào, sau khi dòng không khí này nhận nhiệt, người ta không thải hết ra ngoài mà tận dụng một phần không khí nóng này để đưa vào đáy tháp nung, giúp cho quá trình cháy của nguyên liệu mang vào được thận lợi hơn do không khí nóng sẽ nhanh làm khô nguyên liệu, giảm bớt được năng lượng cho quá trình sấy nguyên liệu.
6. Kết luận
Sau khi tìm hiểu và phân tích exergy, chúng ta có thể hiểu rõ:
- Exergy là gì
- Cách tính exergy
- Những yếu tố ảnh hưởng đến exergy trong hệ thống công nghệ hóa học nói chung và hệ thống sản xuất xi măng nói riêng.
Từ đó rút ra được các phương pháp để tiết kiệm năng lượng trong quá trình sản xuất xi măng đồng thời có thể ứng dụng trong các quá trình hóa học sau này.
7. Tài liệu tham khảo
[1]. Nguyễn Minh Tuyển, Phạm Văn Thiêm – Kỹ thuật hệ thống công nghệ hóa học – NXB Khoa học kỹ thuật – Hà Nội – 2001
[2]. http://www.environmental-expert.com/ – Exergy analysis of cement production
Tải xuống tài liệu học tập PDF miễn phí
[sociallocker id=”19555″] Tải Xuống Tại Đây [/sociallocker]