Đồ án tốt nghiệp Hệ thống phun xăng điện tử EFI/TCCS
Mọi ý kiến đóng góp xin gửi vào hòm thư: [email protected]
Kéo xuống để Tải ngay đề cương bản PDF đầy đủ: Sau “mục lục” và “bản xem trước”
(Nếu là đề cương nhiều công thức nên mọi người nên tải về để xem tránh mất công thức)
Đề cương liên quan:Đồ án tốt nghiệp Tìm hiểu về động cơ điện một chiều
[toc]
[pdfviewer width=”800px” height=”1000px” beta=”true/false”]http://hotroontap.com/wp-content/uploads/2019/04/%C4%90%E1%BB%93-%C3%A1n-t%E1%BB%91t-nghi%E1%BB%87p-H%E1%BB%87-th%E1%BB%91ng-phun-x%C4%83ng-%C4%91i%E1%BB%87n-t%E1%BB%AD-EFI-TCCS.pdf[/pdfviewer]
Tải ngay đề cương bản PDF tại đây: Đồ án tốt nghiệp Hệ thống phun xăng điện tử EFI/TCCS
PHẦN I
HỆ THỐNG PHUN XĂNG ĐIỆN TỬ EFI /TCCS
2.1. KHÁI QUÁT HỆ THỐNG PHUN XĂNG ĐIỆN TỬ EFI/TCCS.
2.1.1. Ưu điểm của hệ thống phun xăng điện tử.
Hệ thống phun xăng có nhiều ưu điểm hơn bộ chế hòa khí là:
- Dùng áp suất làm tơi xăng thành những hạt bụi sương hết sức nhỏ.
- Phân phối hơi xăng đồng đều đến từng xylanh một và giảm thiểu xu hướng kích nổ bởi hòa khí loãng hơn.
- Động cơ chạy không tải êm dịu hơn.
- Tiết kiệm nhiên liệu nhờ điều khiển được lượng xăng chính xác, bốc hơi tốt, phân phối xăng đồng đều.
- Giảm được các khí thải độc hại nhờ hòa khí loãng.
- Mômen xoắn của động cơ phát ra lớn hơn, khởi động nhanh hơn, xấy nóng máy nhanh và động cơ làm việc ổn định hơn.
- Tạo ra công suất lớn hơn, khả năng tăng tốc tốt hơn do không có họng khuếch tán gây cản trở như động cơ chế hòa khí.
- Hệ thống đơn giản hơn bộ chế hòa khí điện tử vì không cần đến cánh bướm gió khởi động, không cần các vít hiệu chỉnh.
- Gia tốc nhanh hơn nhờ xăng bốc hơi tốt hơn lại được phun vào xylanh tận nơi.
- Đạt được tỉ lệ hòa khí dễ dàng.
- Duy trì được hoạt động lý tưởng trên phạm vi rộng trong các điều kiện vận hành.
- Giảm bớt được các hệ thống chống ô nhiễm môi trường.
2.2. PHÂN LOẠI HỆ THỐNG PHUN XĂNG.
2.1.1. Phân loại theo điểm phun.
- Hệ thống phun xăng đơn điểm (phun một điểm): Kim phun đặt ở cổ ống góp hút chung cho toàn bộ các xi lanh của động cơ, bên trên bướm ga.
- Hệ thống phun xăng đa điểm (phun đa điểm ): mỗi xy lanh của động cơ được bố trí 1 vòi phun phía trước xupáp nạp.
2.2.2. Phân loại theo phương pháp điều khiển kim phun.
- Phun xăng điện tử: Được trang bị các cảm biến để nhận biết chế độ hoạt động của động cơ (các sensors) và bộ điều khiển trung tâm (computer) để điều khiển chế độ hoạt động của động cơ ở điều kiện tối ưu nhất.
- Phun xăng thủy lực: Được trang bị các bộ phận di động bởi áp lực của gió hay của nhiên liệu. Điều khiển thủy lực sử dụng cảm biến cánh bướm gió và bộ phân phối nhiên liệu để điều khiển lượng xăng phun vào động cơ. Có một vài loại xe trang bị hệ thống này.
- Phun xăng cơ khí: Được điều khiển bằng cần ga, bơm cơ khí và bộ điều tốc để kiểm soát số lượng nhiên liệu phun vào động cơ.
2.2.3. Phân loại theo thời điểm phun xăng .
- Hệ thống phun xăng gián đoạn: Đóng mở kim phun một cách độc lập, không phụ thuộc vào xupáp. Loại này phun xăng vào động cơ khi các xupáp mở ra hay đóng lại. Hệ thống phun xăng gián đoạn còn có tên là hệ thống phun xăng biến điệu.
- Hệ thống phun xăng đồng loạt: Là phun xăng vào động cơ ngay trước khi xupáp nạp mở ra hoặc khi xupáp nạp mở ra. Áp dụng cho hệ thống phun dầu.
- Hệ thống phun xăng liên tục: Là phun xăng vào ống góp hút mọi lúc. Bất kì lúc nào động cơ đang chạy đều có một số xăng được phun ra khỏi kim phun vào động cơ . Tỉ lệ hòa khí được điều khiển bằng sự gia giảm áp suất nhiên liệu taị các kim phun. Do đó lưu lượng nhiên liệu phun ra cũng được gia giảm theo.
2.2.4. Phân loại theo mối quan hệ giữa các kim phun.
- Phun theo nhóm đơn: Hệ thống này, các kim phun được chia thành 2 nhóm bằng nhau và phun luân phiên. Mỗi nhóm phun một lần vào một vòng quay cốt máy.
- Phun theo nhóm đôi: Hệ thống này, các kim phun cũng được chia thành 2 nhóm bằng nhau và phun luân phiên.
- Phun đồng loạt: Hệ thống này, các kim phun đều phun đồng loạt vào mỗi vòng quay cốt máy. Các kim được nối song song với nhau nên ECU chỉ cần ra một mệnh lệnh là các kim phun đều đóng mở cùng lúc.
- Phun theo thứ tự : Hệ thống này, mỗi kim phun một lần, cái này phun xong tới cái kế tiếp.
2.3. KẾT CẤU CỦA HỆ THỐNG PHUN XĂNG ĐIỆN TỬ LOẠI D (không có cảm biến lưu lương gió).
Ngày nay hầu hết các động cơ xăng đều sử dụng hệ thống phun xăng thay cho bộ chế hòa khí. Các hang xe lớn như Toyota, Daewoo, Hon da, Ford… đều phát triển các công nghệ phun xăng để đạt hiệu quả tối ưu nhất.
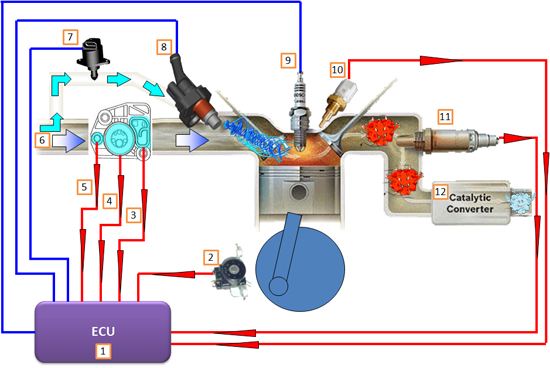
Khái quát hệ thống phun xăng điện tử: khi động cơ hoạt động với nhiệt độ và tải trọng bình thường, hiệu suất cháy tối ưu của nhiên liệu xăng đạt được khi tỉ lệ không khí/nhiên liệu là: 14,7/1. Khi động cơ lạnh hoặc khi tăng tốc đột nghột thì tỉ lệ đó phải thấp hơn có nghĩa nhiên liệu đậm đặc hơn. Hoặc khi động cơ hoạt động ở vùng cao, không khí loãng hơn thì tỉ lệ không khí/nhiên liệu lại phải cao hơn (nhiều không khí hơn). Các hoạt động đó được ECU thu nhận và điều khiển chính xác.
Hình 2.1. Khái quát hệ thống phun xăng D EFI.
- Nhiên liệu có áp suất cao từ thùng xăng đến kim phun nhờ vào một bơm xăng đặt trong thùng xăng hoặc gần đó. Nhiên liệu được đưa qua bầu lọc trước khi đến kim phun.
- Nhiên liệu được đưa đến kim phun với áp suất cao không đổi nhờ có bộ ổn áp. Lượng nhiên liệu không được phân phối đến họng hút nhờ kim phun được quay lại thùng xăng nhờ một ống hồi xăng.
- Bao gồm các cảm biến động cơ, ECU, khối lắp ghép kim phun và dây điện.
- ECU quyêt đinh viêc cung câp bao nhiêu nhiên liêu cân th iêt cho đông cơ thông qua cac tin hiêu phat ra tư cac cam biên .
- ECU câp tin hiêu điêu khiên kim p hun chinh xac theo thơi gian : Xac đinh đô rông cua xung đưa đên kim phun hoăc thơi gian phun đê tao ra môt ty lê xăng/không khi thich hơp.
Hê thông EFI/TCCS:
Với công nghê máy ti nh điêu khiên trên đông cơ ôtô , hê thông EFI đi từ viêc đơn gian chỉ la điêù khiên phun xăng đên viêc tich hợp thêm cá c bô phận điêu khiên khác:
- Điều khiển đánh lửa (ESA): Hê thông EFI/TCCS điêu chinh goc đanh lưa theo điêu kiên hoat đông tưc thơi cua đông cơ , tinh toan hơp ly thơi gian đanh lưa va keo dai tia lưa điên vơi thơi gian ly tương nhât.
- Điều khiển tốc độ không tải (ISC): EFI/TCCS điêu chinh tôc đô không tai bơi ECU. ECU kiêm tra điêu kiên hoat đông cua đông cơ đê đưa ra phương thưc điêu khiên tơi van điên tư đong mơ mach không tai.
- Tuần hoàn khí xả (EGR): Đưa một phần khí xả quay trở lại buồng đốt
để hòa với khí nạp nhằm mục đích giảm nồng độ chất gây ô nhiễm môi trường NOx. Điêu khiên ưng dung trên thông qua môt van khoa chân không đăt trên ông nap , cung câp thông tin cho ECU đê co quyêt đinh mơ van hôi lưu khi xa hay không .
- Các hệ thố́ng liên quan : Điêu khiên sô tư đông , hê thông cam biên , điêu hoa không khi , cung câp điên, tự chẩn đoán kiểm tra phát hiện lỗi của động cơ…
2.4. HỆ THỐNG ĐIỀU KHIỂN ĐIỆN TỬ EFI/TCCS TRÊN ĐỘNG CƠ
5A FE.
2.4.1. Hệ thống TCCS.
Là hệ th ống điều khiển điện tử theo chuẩn TCCS của hãng Toyota. TCCS được viết tắt: (Toyota computer control system) hiểu là hệ thống điều khiển động cơ tổng hợp bằng máy tính trên xe Toyota.
Hình 2.2. S¬ ®å tæng qu¸t khèi ®iÒu khiÓn.
2.4.2. Khối tín hiệu.
Khèi nµy bao gåm c¸c c¶m biÕn cã nhiÖm vô cung cÊp th«ng tin vÒ t×nh tr¹ng cña ®éng c¬ cho ECU. Sử dụng cảm biến để thu nhận các biến đổi về nhiệt độ, sự chuyển dịch vị trí của các chi tiết, độ chân không…Chuyển đổi thành các dạng tín hiệu điện mà có thể lưu t rữ trong bộ nhớ, truyền đi, so sánh.
- Cảm biến vị trí bướm ga.
Hình 2.3.Cấu tạo cảm biến vị trí bướm ga.
Cảm biến có một trục quay gắn trên đó là một đĩa có rãnh xoắn chân ốc.Trục quay được lai với trục quay của bướm ga. Khi trục này quay sẽ làm đĩa xoắn ốc quay đẩy dần cực E2 đến tiếp xúc với cực PSW hoặc IDL nằm ở hai đầu của rãnh xoắn ốc.
Hình 2.4. Kết nối cảm biến vị trí bướm ga.
Cảm biến có nhiệm vụ xác định chế độ không tải và có tải của động cơ. Cực IDL khi được đóng mạch với E2 dòng điện sẽ đi từ bộ ổn áp 5V hoặc 12V về E2 ra mát(-) gây ra sụt áp tại cực IDL, có nghĩa một chân vào/ra của
- điều khiển nối với IDL sụt áp theo ( về mức thấp: 0). Sẽ mô tả tín hiệu bướm ga đóng (động cơ chạy không tải). Tương tự cực PSW khi đóng mạch với E2 sẽ cho tín hiệu mở bướm ga hết cỡ (động cơ chạy toàn tải). Hai cực IDL, PSW luôn có một trong hai mức tín hiệu đóng/tắt. Vơi loai cam biên nay nhân thây khi IDL đong mach vơi E 2 thi bươm ga he mơ môt goc nho 1,5º va khi PSW đong mach vơi E2 thi goc mơ bươm ga la 70º. Nhân thây khi bươm ga trong khoang giưa hai cưc IDL va PSW thi tin hiêu đưa vao ECU ơ hai cưc
đo la đông mưc nhau nên không thê xac đinh đươc goc mơ bươm ga . ECU phai dưa vao môt cam biê n chân không và cảm biến nhiệt độ khí nạp đê xac đinh lưu lương không khi đưa vao hong hut.
ECU sử dụng thông tin từ̀ cực IDL, PSW để biết::
- Chế độ động cơ: Chế độ không tải (bướ́m ga đóng). Chế độ toàn tải (bướ́m ga mở rộng).
- Công tắc quạt làm mát và các tác động phát ra khi bướm ga mở
rộng.
- Điều chỉnh tỷ lệ nhiên liệu/không khí.
Hình 2.5. Đặc tính của tín hiệu cảm biến vị trí bướm ga.
- Cảm biến nhiệt độ nước làm mát.
Hình 2.6. Cấu tạo và đặc tính của cảm biến nhiệt độ nước làm mát.
Cảm biến nhiệt độ nước làm mát là một biến trở nhiệt. Dòng điện qua biến trở tỷ lệ với nhiệt độ. Cực THW nối với bộ nguồn 5V hoặc 12V. Luôn có một dòng điện chạy từ cực THW đến cực E2 ra mát (cực âm). Khi nhiệt độ tăng điện trở của biến trở giảm, cường độ dòng điện chạy qua biến trở tăng lên gây sụt áp tại cực THW và E2. Do cảm biến mắc song song với bộ chuyển
đổi tương tự sang số (ACD) nên tín hiệu mà bộ vi điều khiển nhận được sẽ mô tả đúng dạng tín hiệu mà cảm biến gửi đến.
Khi động cơ khởi động lạnh các chi tiết chuyển động ma sát vời nhau trong động cơ không giãn nở đều, bơm dầu cũng chưa kịp chuyển dầu đến các bộ phận đó làm tăng ma sát. Động cơ rất khó khởi động làm thoát ra không khí một lượng khí thải độc hại, do vậy phải làm đậm đặc nhiên liệu trong hỗn hợp cháy giúp động cơ dễ khởi động. Ngược lại khi động cơ quá nóng cũng làm hư hỏng và bó cứng các chi tiết. Nhiệt độ thích hợp để động cơ hoạt động 82°C
Hình 2.7. Kết nối cảm biến nước làm mát
ECU sö dông tÝn hiÖu tõ c¶m biÕn nhiÖt níc lµm m¸t ®Ó ®a ra c¸c
quyÕt ®Þnh:
- BËt/t¾t qu¹t lµm m¸t.
- Lµm ®Ëm/lo¶ng nhiªn liÖu.
- Sö dông håi lu khÝ x¶.
- Cảm biến tốc độ động cơ.
Hình 2.9. Cấu tạo và vị trí của cảm biến vận tốc trục cam.
Hình 2.10. Kết nối và tín hiệu của cảm biến vận tốc trục cam.
Cảm biến tốc độ động cơ (Ne) được đặt trong bộ đánh lửa, là loại cảm biến điện từ, rôto có 24 răng đưa ra tín hiệu điện áp xoay chiều. Nhận thấy tùy theo tốc độ của động cơ mà tín hiệu đưa ra thay đổi về tần số và biên độ của dòng điệ n xoay chiều. Để xác định vận tốc trục cam tại thời điểm tức thời ECU sẽ chỉ lấy 1 trong 2 thông số biến đổi là tần số hoặc biên độ của tín hiệu gửi đi từ bộ cảm biến. Cảm biến vận tốc trục cam thường kết hợp với cảm
biến đánh lửa (G) có 4 răng. Nhận thấy từ biểu đồ tín hiệu của hai cảm biến này cơ thể thấy ECU kiểm soát được hoạt động của động cơ sau 30º góc quay của trục khuỷu.
ECU sư dung tin hiêu tư cam biên vân tôc truc cam đê :
- Điêu khiên goc đanh lưa va thơi gian tia lưa.
- Tăng giam đô rông xung điêu khiên kim phun.
- Công tăc van không tai nhanh.
- Sô tư đông.
- Cảm biến nhiệt độ khí nạp.
Hình 2.11. Kết nối cảm biến nhiệt độ khí nạp.
Vê ban chât cam biên nhiêt đô khi nap hoat đông giông như cam biên nhiêt đô nươc lam mat . Viêc xac đinh nhiêt đô khi nap la cân thiêt vi thay đôi nhiêt đô se dẫn đên sư thay đôi ap xuât va mât đô cua không khi . Vi không khi se đâm đăc hơn khi lanh va loang hơn khi nong. Đê xac đinh đươc đô đâm đăc cua không khi ơ nhiêt đô hiên hiên tai , ECU se tính toán dưa vao hai dữ liệu đưa vào là: nhiệt độ khí nạp, độ chân không tại họng hút.
Tin hiêu từ cam biên nhiêt đô khi nap được ECU sư dung đê:
- Điêu khiên kim phun nhiên liêu lam đâm/loang nhiên liêu.
- Kết hợp với cảm biến chân không xác định lưu lượng khí nạp.
- Van hồi lưu khí thải.
Hình 2.12. Đặc tính của tín hiệu cảm biến nhiệt độ khí nạp.
- Cảm biến áp suất đường nạp .
Cam biên chân không đ ươc găn thông vơi đương ông nap . Sư thay đôi ap xuât lam thay đôi điên ap giưa hai cưc PIM va E2.
H
Hình 2.13. Kết nối cảm biến chân không.
ECU sư dung tin hiêu cam biên chân không đê xác định ta i trọng của đô ng cơ qua đo:
- Điêu khiên kim phun.
- Kết hợp với cảm biến nhiệt độ khí nạp xác định lưu lượng khí nạp. Do khác với động cơ loại L có cảm biến xác định lưu lượng khí nạp. Động cơ 5A-FE không sử dụng cảm biến lưu lượng khí nạp mà thay vào đó là cả m biến chân không và cảm biến nhiệt độ khí nạp: Thông tin từ hai cảm biến này đủ để xác định được lượng không khí nạp vào theo một công thức gần đúng sau :
Xét tại thời điểm tức thì coi như khối khí trong đường ống không chuyển động.
P.V = R.T.m/µ trong đó :V – thể tích của đường ống nạp.
R – hằng số của chất khí. M – lượng khí. µ – khối lượng mol chất khí.
T – nhiệt độ chất khí. P – áp suất (P < 1atm).
=> m = P.V.µ/R.T
Nhậ̣n thấy khối lượ̣ng khí trong đường ống nạp chỉ̉ phụ thuộc vào á́p suất P và nhiệt độ T. Cá́c đại lượ̣ng khá́c đều là hằng số.
Hình 2.14. Đặc tính của tín hiệu cảm biến chân không.
- 6. Cảm biến oxy.
Hình 2.15. Kết nối cảm biến oxy.
Cam biên oxy đươc găn trên đương ông xa , tiêp xuc trưc tiêp vơi khi xa đông cơ. Chât xuc tac se phan ưng vơi oxy co trong khi xa lam điên trơ cua no thay đôi. Tin hiêu điên ap đo giup ECU biêt đươc trong khi xa co dư nhiêu hay it oxy. Biêt răng vơi ty lê không khi /nhiên liêu la 14,7/1 oxy se đươc đôt hêt trong qúa trinh chay ơ buông đôt . ECU sư dung tin hiêu tư cam biên oxy đê điêu chinh ti lê không khi /nhiên liêu.
Hình 2.16. Cấu tạo cảm biến oxy.
2.5. KHỐI XỬ LÝ (ECU).
Khèi xö lý ECU là sự tập hợp của nhiều modul khác nhau :ổn áp, mạch khuyếch đại, chuyển đổi Analog sang Digital và ngược lại, vi điều khiển, thạch anh tạo dao động, mạch tách tín hiệu…Tất cả được tích hợp trên một bo mạch cứng qua đó tín hiệu được truyền cho nhau với tốc độ nhanh hơn tiết kiệm năng lượng hơn và ổn định .
2.5.1. Bộ ổn áp.
Máy phát điện và acquy trong ôtô cung cấp điện áp 12V không ổn định, lúc cao hơn lúc thấp hơn. Chíp vi điều khiển và các cảm biến với những linh kiện điện tử bán dẫ̃n cần điện áp nhỏ hơn và ổn định. Vì thế cần có một bộ ổn áp cung cấp điện áp ổn định.
Người ta sử dụng IC ổn á́p để thực hiện việc này:
Hình 2.17. Mạch ổn áp dùng IC 2.5.2. Bô chuyên đôi Analog/Digital (A/D).
Cac hoat đông cua đông cơ thương rât nhanh , do vây tin hiêu điêu khiên từ ECU truyên đi cung phai tương ưng. Do vây giai phap truyên tin hiêu trong hê thông la truyên song song. Cac cam biên liên tuc va đông loat gưi tin hiêu đên ECU . Nhưng tin hiêu co nhiêu mưc gia tri như nhiêt đô nươc lam mat, nhiêt dô khi nap , cam biên oxy , vân tôc truc cam đều là tín hiệu dạng tương tự… se đươc chuyên đôi sang tin hiêu dang sô . Chip vi điêu khiên sư dung truyền tin dang 8 bit. Vi du vơi tin hiêu tư cam biên nhiêt đô nươc lam mat co dai điên ap thay đôi tư 0 – 5V ưng vơi nhiêt đô thay đôi tư 176ºF đên 0ºF se co 256 mưc tin hiêu, môi mưc tương ưng vơi 5/256 = 0,0195Vol.
2.5.3. Vi điêu khiên.
Có rất nhiều họ vi điều khiển và do nhiều hãng chế tạo được sử dụng trong ECU: General Instrument, Motorola, Dallas… Nhưng đều có nhiệm vụ chung là xử lý tín hiệu gửi đến từ cảm biến và đưa ra cơ cấu chấp hành theo một chương trình đã định sẵn. Chíp vi điều khiển trong ECU động cơ 5A FE có dạng hình thanh 42 chân vào/ra.
Hình 2.18. Vi điều khiển
Cấu tạo chung của vi điều khiển sẽ gồm có các chân vào/ra (I/O) để nhận và truyền dữ liệu, CPU xử lý các phép toán cộng trừ nhân chia và các phép toán logic. Ram để lưu các dữ liệu xử lý tức thời, PRom bộ ghi nhờ trương chình do nhà sản xuất cài vào , cùng các đường các đường truyền dữ liệu (BUS).
2.5.4. Chương trình điều khiển.
Chương trình điều khiển do nhà sản xuất nạp v ào trong bộ nhớ Rom của vi điều khiển. Vi điều khiển dựa vào chương trình để xử lý tín hiệu và điều khiển các bộ phận hoạt động. Chương trình thường được viết bằng hợp ngữ sau khi được dịch sang dạng mã máy để vi điều khiển hiểu được sẽ được nạp vào trong bộ nhớ PRom. Ví dụ tại chân I/O – P0.1 của vi điều khiển nối với cực IDL xuất hiện mức bít 0 điều này có nghĩa bướm ga đóng, động cơ chạy ở chế độ không tải. Ngay lập tức vi điều khiển sẽ truyền một bít cao 1 đến chân I/O – P2.1, chân này nối với bộ khuyếch đại điều khiển van điện từ mở mạch không tải.
Move P2.1,#1
Thông thường vi điều khiển sẽ có hai phương thức để điều khiển các hoạt động của các bộ phận. Một là dựa vào các sự kiện mới do cảm biến gửi đến đển tiến hành ngắt ưu tiên các phục vụ mới. Hai là vi điều khiển sẽ liên
tục kiểm tra các hoạt động và nếu phát hiện cần ưu tiên phục vụ chức năng nào sẽ phục vụ chức năng đó.
Tạo trễ: tùy theo họ̣ vi điều khiển mà có cá́c công cụ tạo trễ hay bộ đị̣nh thời khá́c nhau. Nhưng về bản chất là việc cho vi điều khiển lặp đi lặp lại một số hạn đị̣nh lệnh nào đó, mỗi lệnh vi điều khiển sẽ xử lý mất η giây. Từ̀ đó xá́c đị̣nh số lần lặp để có thời gian trễ hợ̣p lý nhất .
2.5.5. Ý nghĩa các cực của ECU.
26 P
| E01 | #10 | Sta | Ox | G – | G1 | Igf | Igt | Tha | Pim | Thw | Nsw | Egr |
| Eo2 | #20 | E1 | Tsw | E21 | Ne | Thg | Idl | Vcc | Psw | E2 | Od | Visc |
16 P
T Act Ac2 Els Fc Cco Bat +b1
| Vf | Spd Ac1 Egw W +b |
| KÝ | Tªn Cäc ®Êu d©y | KÝ | Tªn Cäc ®Êu | |
| hiÖu | hiÖu | d©y | ||
| EO1 | Cùc ©m (-) | T | §Õn gi¾c kiÓm tra | |
| EO2 | Cùc ©m (-) | |||
| NO10 | TÝn hiÖu ®iÒu khiÓn vßi phun nhiªn liÖu | THA | TÝn hiÖu c¶m biÕn | |
| nhiÖt ®é khÝ n¹p | ||||
| NO20 | TÝn hiÖu ®iÒu khiÓn vßi phun nhiªn liÖu | Vcc | Nguån nu«i c¶m | |
| biÕn ch©n kh«ng | ||||
| STA | TÝn hiÖu khëi ®éng | EGR | Van kho¸ tuÇn | |
| hoµn khÝ x¶ | ||||
| TÝn hiÖu c¶m biÕn | ||||
| IGT | TÝn hiÖu thêi ®iÓm ®¸nh löa | idl | vÞ trÝ bím ga | |
| ®ãng | ||||
| TÝn hiÖu c¶m biÕn | ||||
| E1 | M¸t ®éng c¬ | THW | nhiÖt ®é níc lµm | |
| m¸t | ||||
| OX | TÝn hiÖu c¶m biÕn oxy trong khÝ th¶i | E2 | Cùc ©m (-) | |
| PSW | TÝn hiÖu c¶m biÕn vÞ trÝ bím ga më | spd | C¶m biÕn tèc ®é | |
| xe | ||||
| PIM | TÝn hiÖu c¶m biÕn ch©n kh«ng | fc | §Õn r¬le ®iÒu | |
| khiÓn b¬m x¨ng | ||||
| NSW | C«ng t¾c sè kh«ng | A/c | C«ng t¾c khíp | |
| nèi ®iÖn tõ A/C. | ||||
| TÝn hiÖu håi tiÕp tØ lÖ kh«ng khÝ/nhiªn | TÝn hiÖu ®iÒu | |||
| VF | visc | khiÓn van ch©n | ||
| liÖu | ||||
| kh«ng t¶i nhanh | ||||
| G − | TÝn hiÖu tõ c¶m biÕn ®¸nh löa (®iÖn tõ | BATT | Nguån + B cho | |
| 4c¹nh) | ECU | |||
| E21 | Cùc ©m (-) | W | TÝn hiÖu cho ®Ìn | |
| kiÓm tra | ||||
| G1 | TÝn hiÖu tõ c¶m biÕn ®¸nh löa (®iÖn tõ | +B1 | Nguån + B cho | |
| 4c¹nh) | ECU | |||
| NE | TÝn hiÖu c¶m biÕn vËn tèc trôc cam ®Æt | +B | Nguån + B cho | |
| trong bé chia ®iÖn.(®iÖn tõ 24 c¹nh) | ECU | |||
| IGF | TÝn hiÖu x¸c nhËn ®¸nh löa | els | §Ìn pha | |
| §Ìn b¸o nhiÖt ®é | ||||
| THG | C¶m biÕn nhiÖt ®é tuÇn hoµn khÝ x¶ | EGW | cña chÊt xóc t¸c | |
| chuyÓn ®æi. | ||||
| TSW | Khãa nhiÖt ®é níc | act | ||
| od | C«ng t¾c sè kh«ng | cco | §Õn check | |
| connector | ||||
2.6. KHỐI CƠ CẤU CHẤP HÀNH.
Bao gồm các kim phun, các rơle, công tắc điện từ, sử dụng điện áp 12V và tiêu thụ công suất lớn hơn rất nhiều so với điện áp cung cấp từ cổng ra của vi điều khiển.
Vi điều khiển đưa ra tín hiệu dạng xung để điều khiển cơ cấu chấp hành. Tín hiệu đưa ra có điện áp không đáp ứng được công suất của thiết bị, do vậy phải được đưa qua bộ khuyếch đại.
Nguyên tắc chung là vi điều khiển sẽ cung cấp 1 điện áp dạng xung đến cực điều khiển Bazơ (B) của Tranzitor làm nó phân cực thuận, do đó xuất hiện một dòng điện từ cực Emiter (E) đến cực Connecter (C). Dòng điện này lớn hơn rất nhiều so với dòng điều khiển cung cấp từ vi điều khiển.
Hình 2.19. Sơ đồ khối điều khiển cơ cấu chấp hành.
Hệ thống mạch điện .
- Điều khiển kim phun nhiên liệu.
- Điều khiển đánh lửa.
- Điều khiển cơ cấu không tải.
- Các mạch điện của hệ thống cảm biến : nứơc làm mát, vị trí bướm ga, cảm biến nhiệt khí nạp, cảm biến chân không, công tắc nước làm mát
- Hệ thống cung cấp nhiên liệu.
- Điều khiển kim phun nhiên liệu.
Động cơ 5A-FE sử dụng kiểu phun nhiên liệu kiểu phun đồng thời.
Khóa điện
Kim phun điện
trở cao
Hình 2.20. Mạch điện điều khiển kim phun.
Các kim phun mắc song song với nhau. Do vậy chỉ cần cung cấp một xung điều khiển thì tất cả các kim phun sẽ đồng loạt được kích hoạt. Cuộn điện từ trong kim phun là loại kim phun điện trở cao (high resistance injector) do vậy không cần sử dụng thêm điện trở kéo bên ngoài. Đo bằng đồng hồ vạn năng xác định được điện trở của các kim phun là 23Ω.
Tồn tại hai loại điều khiển kim phun là : điều khiển bằng điện áp (voltage controlled injector) và điều khiển bằng dòng điện (current controlled injector) .
| Điều khiển kiểu | Điều khiển kiểu | |
| điện áp | dòng điện | |
| Cuộn từ trở | ||
| Kim phun điện | Kim phun điện | Kim phun điện |
| trở thấp | trở cao | trở cao |
Dòng
điện
(A)
A : Transistor đóng
B : Kim phun mở
Hình 2.31. Phản ứng của kim phun.
Nhận thấy khi điều khiển kiểu dòng điện với tín hiệu hồi tiếp đóng và mở transistor ‘chắc’ hơn. Kim phun mở nhanh hơn và đóng ngay sau khi kết thúc xung điều khiển.
- Điều khiển đánh lửa.
Động cơ 5A-FE sử dụng hệ thống đánh lửa tích hợp trong bộ chia điện : bao gồm bộ chia điện (sử dụng con quay chia điện), cảm biến vị trí tử điển (G), cảm biến vận tốc trục cam, bôpin cao áp các bộ phận điều khiển bán dẫ̃n khác, cùng với sự điều khiển của ECU. Các tín hiệu đánh lửa sớm do ECU quyết định, do vậy không sử dụng điều khiển góc đánh lửa sớm bằng chân không.
Hình 2.32. Mạch điều khiển đánh lửa.
Tại bộ chia điện có 7 đầu dây ra, bao gồm :
- IGF (xác nhậ̣n đá́nh lửa): Sức điện động đảo chiều tạo ra khi dòng điện trong cuộn sơ cấp bị ngắt sẽ làm cho mạch điện này gửi một tín hiệu IGF đến ECU, nó sẽ biết được việc đánh lửa có thực sự diễn ra hay không nhờ tín hiệu này.
- IGT (thời điểm đánh lửa): ECU động cơ gửi một tín hiệu IGT đến IC đánh lửa dựa trên tín hiệu từ cảm biến sao cho đạt được thời điểm đánh lửa tối ưu.Tín hiệu IGT này phát ra chỉ ngay trước thời điểm đánh lửa được tính toán bởi bộ vi xử lý, sau đó ắt ngay. Bugi sẽ phát tia lửa điện khi tín hiệu này tắt đi.
- NE: Tín hiệu NE được ECU động cơ sử dụng để nhận biết tốc độ động cơ. Tín hiệu NE được sinh ra trong cuộn dây nhận tín hiệu nhờ roto. Roto tín hiệu NE có 24 răng. Nó kích hoạt cuộn dây nhận tín hiệu NE 24 lần trong một vòng quay của bộ chia điện.
- G-: Dây trung hòa của c ảm biến vận tốc trục cam và cảm biến tử điểm hành trình xylanh.
- G1: Tín hiệu G báo cho ECU biết góc trục khuỷu tiêu chuẩn. Được sử dụng để xác định thời điểm đánh lửa và phun nhiên liệu so với điểm chết trên (TDC) của mỗi xylanh.
- Transistor công suất điề u khiển đóng cắt mạch cung cấp điện từ acquy cho cuộn sơ cấp của bopin cao áp.
- IG (-): Cực âm (-) của cuộn sơ cấp.
- 3. Điều khiển cơ cấu không tải.
Hệ thống ISC điều khiển tốc độ không tải bằng một van ISC để thay đổi lượng khí đi tắt qua bướm ga phụ thuộc vào các tín hiệu từ ECU động cơ. Động cơ 5A-FE sử dụng loại van điều khiển bằng hệ số tác dụng: Kết cấu của loại van ISC này như hình vẽ. Khi dòng điện chạy qua do tín hiệu từ ECU động cơ, cuộn dây bị kích thích và van chuyển động. Điều này sẽ thay đổi khe hở giữa van điện từ và thân van, điều khiển được tốc độ không tải. (Tốc độ không tải nhanh đượ̣c điều khiển bằng một van khí phụ). Trong hoạt động thực tế, dòng điện qua cuộn dây được bật tắt khoảng 100lần/giây, nên vị trí của van điện từ được xác định bằng tỷ lệ giữa thời gian dòng điện chạy qua so
với thời gian mà nó tắt (có nghĩa là hệ số tá́c dụng). Nói theo một cách khác, van mở rộng khi dòng điện chạy lâu hơn trong cuộn dây.
Từ lọc không khí
Từ ECU
Cuộn điện từ
Đến buồng nạp
ACV
Giảm Tăng
Buồng nạp
| Cảm biến | Bướm ga |
| as |
Hình 2.33. Mạch điện nguyên lý củ̉a VISC
Hình 2.34. Hệ số tác dụng
- Hệ thống cung cấp nhiên liệu.
Hệ thống cung cấp nhiên liệu có nhiện vụ tạo ra một áp suất thích hợp của dòng xăng trong đường ống, cung cấp đến các kim phun.
Hình 2.35. Sơ đồ mạch cung cấp nhiên liệu.
| Giắc kiểm tra | Rơle mở mạch |
| Bơm xăng | |
| Rơle EFI chính | Transistor công |
| suất bơm xăng |
Khóa điện
Accu
Hình 2.36. Mạch điện điều khiển bơm xăng.
- Để bơm xăng không hoạt động khi chưa tiến hành khởi động. Tiến hành nối cực âm của rơle điều khiển bơm xăng với cực FC của ECU. Khi ECU nhận được tín hiệu từ cảm biến vận tốc trục cam (NE), sẽ đóng mạch hoạt động rơle điều khiển bơm xăng.
2.7. CÁC THÔNG SỐ CỦA HỆ THỐNG EFI TRÊN ĐỘNG CƠ 5A FE.
| Áp suất nhiên | Áp suất nhiên liệu | 2,7 | – 3,1 kg/cm² | |
| liệu qua ổn áp | (38-44 psi, 265 – 304 kpa) | |||
| Điện trở | Gần 2,3 Ω | |||
| Kim phun | Lượng phun | 46 – 49 cc / 15 giây | ||
| Chênh lệch lượng phun giữa | 5 cc hoặc ít hơn một giọt / | |||
| các kim phun. | phút. | |||
| Bướm ga | Đóng hoàn toàn | 1,5 | ˚ | |
| Cảm biến vị trí | Giữa các cực | Điện trở | ||
| PSW – E2 | 0 | |||
| bướm ga | IDL – E2 | 0 | ||
| Cảm biến | Nhiệt độ | Điện trở | ||
| – 20˚C | 10 – 20 k Ω | |||
| nhiệt độ khí | ||||
| 0˚C | 4 – 7 k Ω | |||
| nạp | ||||
| 20˚C | 2 – 3 k Ω | |||
| Cảm biến | 40˚C | 0,9 | – 1,3 k Ω | |
| nhiệt độ nước | 60˚C | 0,4 | – 0,7 k Ω | |
| làm mát | 80˚C | 0,2 | – 0,4 k Ω | |
| Cảm biến oxy | Điện trở cuôn dây nhiệt | 5,1 | – 6,3 k Ω | |
| Van không tải | Điện trở | 37 – 44 k Ω | ||
| Chú ý : | |||
| * Tất cả cá́c điện á́p và điện trở đo đượ̣c cùng vớ́i má́y tính đã đượ̣c | |||
| kết nối. | |||
| ECU | * Chắc rằng điện á́p acquy 11V hoặc lớ́n hơn và khóa điện ở vị̣ trí | ||
| ON. | |||
| Cực | Điều kiện | Điện áp (V) | |
| + B – E1 | Khóa điện vị̣ trí ON | 10 – 14 | |
| + B1 – E1 | |||
| BATT – E1 | – | – | ||||
| IDL – E2 | ON | Bướm ga đóng | 5 V | |||
| PSW – E2 | Bướm ga mở | 5 V | ||||
| No. 10 – E1 | ON | 9 | – 14 V | |||
| No. 20 – E1 | ||||||
| W – E1 | Khi không có lỗi và động cơ chạy | 9 | – 14 V | |||
| PIM – E2 | ON | 3,3 – 3,9 V | ||||
| VCC – E2 | 4,5 – 5,5 V | |||||
| THA – E2 | Nhiệt độ không khí họng hút 20˚C | 2,0 – 2,8 V | ||||
| THW – E2 | Nhiệt nước làm mát 80˚ | 0,4 – 0,8 V | ||||
| ON | ||||||
| A/C – E1 | Bật điều hòa | 5 | – 14 V | |||
| T – E1 | Không nối cực T – E1 | 4,5 – 5,5 V | ||||
| Nối cực T – E1 | > 0,5 V | |||||
| Điện trở | ||||||
| Tên cực | Điều kiện | Điện trở (Ω) | ||||
| VCC – E2 | 3 | – 7 Ω | ||||
| THA – E2 | Nhiệt không khí 20˚C | 2 | – 3 Ω | |||
| THW – E2 | Nhiệt nứơc làm mát | 200 – 400 Ω | ||||
| G – G (-) | 140 – 180 Ω | |||||
| NE – G (-) | 140 – 180 Ω | |||||
2.8. CHỨC NĂNG TỰ CHẨN ĐOÁN CỦA ECU.
1. Nguyên tắc của tự chẩn đoán.
ECU cua xe tich hơp môt hê thông tư chân đoan cho phep bao ra cac hư hong cua đông cơ va cac bô phân khac ma không cân phai thao rơi cac chi tiêt đê kiêm tra . Điêu đo thưc hiên nhơ cac cam biên theo dõi tinh trang cua xe , gưi tin hiêu đên ECU đê so sanh vơi cac thông sô chinh xac ma nha san xuât đa tinh toan tư trươc. Nêu phat hiên sư sai khac hê thông se bao lôi thông qua
môt bong đèn nhay sang, hoăc đưa ra môt ma chân đoan đa đươc lưu trong bô nhơ chương trinh của vi điêu khiên đên môt thiêt bi giao diên khac.
Vi du vê tư chân đoan:
ví dụ 1:
Trên hình vẽ mô tả hệ thống tự chẩn đoán, tìm ra một xylanh trong động cơ 4 xylanh không sinh công (nổ) khi đến thứ tự.
Biểu đồ xung phía trên mô tả vận tốc của trục cam ở chế độ không tải do cảm biến cao tần ghi nhận được ngay tại thời điểm động cơ có máy sinh công. Xylanh số 4 không sinh công tại thời điểm đó vận tốc của động cơ giảm xuống là 600 vòng/phút. Vận tốc giảm 5 vòng/phút so với khi động cơ sinh công.
Biểu đồ xung phía dưới ghi nhận tần số dao động tín hiệu của cảm biến trục cam tại thời điểm đó bị kéo dài ra. Tín hiệu bất thường đó cho hệ thống biết có một máy không sinh công.
Hình 2.37. Sử dụng mức tín hiệu để chẩn đoán.
Ngoài việc phát hiện hư hỏng nhưng quan trọng hơn phải biết được nguyên nhân hư hỏng để sửa chữa. Để làm được điều đó hệ thống cần có them các thong tin từ các cảm biến và bộ phận phát ra khác.
Động cơ bỏ má́y do cá́c nguyên nhân:
Hư hỏng bộ chia điện: x = ®óng (1) / sai (0)
Hư hỏng của kim phun: y = ®óng (1) / sai (0)
Không bao kín buồng đốt: z = ®óng (1)/ sai (0)
Hệ thống tự chẩn đoán làm việc có hiệu quả không những phụ thuộc vào số lượng tín hiệu mà nó thu nhận được mà còn phụ thuộc vào chương trình hay phần mềm nạp vào.
Hàm f(x,y,z): thể hiện kết quả chẩn đoán.
f(1,0,0) = hư hỏng bộ chia điện.
f(1,1,0) = hư hỏng do bộ chia điện và kim phun xăng.
f(1,1,1) = hư hỏng do bộ chia điện, kim phun xăng và không bao kín buồng đốt..
Hàm f(x,y,z) thể hiện mối quan hệ giữa các thông số thu được từ cảm biến, vì vậy để chẩn đoán có tính chính xác cao thì việc xây dựng hàm to án học f(x,y,z…) phải chính xác và sát với thực tế.
Xét ví dụ 2: Kiể̉m tra chức năng của bộ̣ trung hòa khí́ thả̉i:
Hệ thống gồm hai cảm biến S1 và S2. Cảm biến S1 đặt ở vị trí khí thải chưa được xỷ lý qua bộ trung hòa, cảm biến S2 đặt ở vị trí khí thải đã đi qua bộ trung hòa.
Biểu đồ xung của cảm biến thứ nhất S1 thể hiện nồng độ oxy trong khí thải. Biểu đồ xung của cảm biến thứ hai S2 thể hiện nồng độ oxy sau khi khí thải đã qua bộ trung hòa. Hệ thống chẩn đoán luôn so sánh giá trị (điện áp) của hai cảm biến này.
Nếu bộ trung hòa khí thải hoạt động bình thường, lượng oxy còn dư trong khí thải được phản ứng với NO x và HC vì vậy không còn oxy thoat ra ngoài. Tìn hiệu của cảm biến S2 luôn thấp hơn so với cảm biến S1. Khi có sự suy giảm chức năng của bộ trung hòa khí thải, Hai tín hiệu của S1 và S2 tiến đến gần nhau. Thông tin đó cho hệ thống biết rằng bộ trung hòa khí thải đã mất chức năng.
Hình 2.38. So sánh tín hiệu của hai cảm biến oxy.
- Ngoài ra hệ thống còn theo dõ̃i tình trạng gửi tín hiệu của các c ảm biến. Nếu cảm biến nào không có tín hiệu gửi đến thì chứng tỏ cảm biến hỏng, ngắn mạch hoặc đứt dây.
2.9. CHẨN ĐOÁN TÍCH HỢP OBD (on-board diagostics).
2.9.1. OBD.
OBD: Được viết tắt của từ (On – Board Diagnostics) hiểu là hệ thống chẩn đoán được tích hợp trong ECU. Hệ thống này bao gồm máy tính (bộ vi điều khiển) cùng phần mềm chẩn đoán và các cảm biến. Hệ thống OBD giám sát chức năng của phun xăng EFI, đánh lửa ESA và các hệ thống khác gồm các cảm biến và cả bản thân nó.
Vậy OBD về bản chất là một hệ thống điện toán sử dụng giải pháp ‘nhúng’ vi điều khiển vào việc tính toán, điều khiển hoạt động kiểm tra chẩn đoán. Hiện nay có rất nhiều phần mềm để cài đặt cho OBD giúp việc xuất dữ liệu ra màn hình LCD có giao diện thân thiện. Đồng thời cung cấp dữ liệu mới và tiêu chuẩn mới cho việc kiểm tra chẩn đoán, xác định tình trạng của động cơ theo tiêu chuẩn hiện hành.
ECU Đè̀n kiểm tra
Vi Điều Khiển
Cảm Biến
Mạch Điện
| OBD | DLC | |||||||
| Hồi tiếp | On Board Diagnostic | Data link connector | ||||||
Hình 2.39. Sơ đồ tổng quát hệ thống OBD.
- Đèn kiểm tra động cơ (Đèn check engine).
Đè̀n kiểm tra gắn trên bảng táplô của xe, đè̀n này sang khi động cơ đang hoạt động đồng nghĩa đã có hư hỏng ở động cơ, hộp số hay bộ phận nào đó. Bình thường đè̀n sẽ sáng khi bật khóa điện ở vị trí ON và sẽ tắt khi động hoạt động được 3 giây.
Hình 2.40. Đè̀n kiểm tra.
- Giắc kiểm tra ( Check connector ): Là một giắc nối được đưa ra tõ bộ Trên đó có các điện cực, sử dụng để đo điện áp và đặt chế độ chẩn đoán.
Hình 2.41. Check connector Về bản chất check connector và DLC là một.
- Cực FB có chức năng kiểm tra bơm xăng.
- Cực W có chức năng cấp tín hiệu cho đè̀n báo lỗi.
- Cực E1 và T.
Trong đó cực E1 luôn nối mass (-). Cực T nối với ECU. Khi tiến hành kiểm tra chẩn đoán bằng đè̀n kiểm tra tiến hành nối ngắn cực T với E1.
- Cực VF điện áp hồi tiếp (voltage feedback).
Sử dụng để xác định tỷ lệ không khí/nhiên liệu.
- Cực IG- sử dụng để xác định vận tốc động cơ.
Bản chất của tín hiệu này được lấy từ cực âm (-) của cuộn đánh lửa. Khi điện áp tại cực âm của cuộn đánh lửa vượt quá 150V, ECU nhận biết tín hiệu sơ cấp này.
- Nhưng động cơ 5A-FE không sử dụng tín hiệu này, mà thay vào đó là tín hiệu NE do cảm biến tốc độ trục cam cung cấp.
2.9.2. Mã chẩn đoán (OBD diagnostic trouble code).
Mã chẩn đoán được phát ra bởi hệ thống chẩn đoán OBD, được lưu trữ và lấy ra từ trong bộ nhớ của ECU. Mã chẩn đoán chỉ cho biết mạch mà ở đó có lỗi đã đựợc hệ thống OBD phát hiện.Việc thiết lập được mã chẩn đoán của người sử dụng là theo dõ̃i thời gian bật sáng và tắt của đè̀n kiểm tra. Các sản phẩm của TOYOTA cùng với OBD sẽ liên tục lấy ra một mã chẩn đoán trong bộ nhớ của ECU cho đến khi cắt cực BATT của ECU với accu.
Vớ́i hệ thống TCCS ECU tồn taị̣ 2 loại mã lỗi : Mã 1 số và mã 2 số
Hình 2.42. Dạng tín hiệu mã chẩn đoán.
Động cơ 5A –FE thể hiện mã chẩn đoán dạng 2 số.
2.9.3. Lấy mã chẩn đoán kiểm tra qua cổng DLC (check connector): OBD
I/M check.
Để kiểm tra chẩn đoán, người thợ sẽ gắn một dây cáp đến các cực của máy tính của OBD (cực củ̉a ECU) thông qua một cổng DLC. Tải các thông tin từ hệ thống chẩn đoán về máy tính, máy tính sẽ thể hiện các thông tin đó trên màn hình. Qua sự phân tích của phần mềm cài trong đó hay qua sự ước tính của nguời thợ để biết được xe ôtô hoạt động như thế nào. Máy tính phục vụ chẩn đoán trên xe sẽ phát ra một mã chẩn đoán nếu có hư hỏng hoặc một vấn đề rắc rối khác hiện tại trên xe mà nó đang gặp phải.
2.9.4. Truyền tin nối tiếp (serial data streams).
Dữ liệu nối tiếp mang thông tin được truyền từ máy tính này đến hiển thị ở một máy tính khác. Dữ liệu được chia thành các bit và được truyền nối tiếp nhau từng bit một. Sử dụng mạch analog/digital, việc truyền tín hiệu số của máy tính từ các cảm biến, cơ cấu chấp hành và các thông tin tính toán khác chỉ thực hiện được khi tín hiệu từ cảm biến được chuyển đổi sang dang bye (8bit) nhị phân trước khi được truyền đến máy tính nhận khác. Tốc độ truyền gọi là baud ví dụ : dữ liệu truyền nối tiếp có 12 thông số, mỗi thông số được chuyển đổi thành 8bit nhị phân vậy sẽ có 96bit. Nếu 96bit được truyền đi trong 1giây thì tốc độ là 96bit/giây hay 96baud. ECU trên động cơ sử dụng phương pháp truyền nối tiếp để gửi thông tin chẩn đoán và các thông số khác của động cơ đến thiết bị kiểm tra chẩn đoán.
Không chịu sự điều khiển của OBD, mà sử dụng truyền dữ liệu nối tiếp tới các thiết bị cầm tay đặc biệt để kiểm tra chẩn đoán (scan tool). Các thông tin từ các cảm biến, cơ cấu chấp hành, góc đánh lửa và phun xăng, được truy cập qua một cáp nối từ thiết bị đến ECU của xe. Có khoảng 20 loại thông tin được truyền đi và được thể hiện trên scan tool.
Hình 2.23. Kết nối với thiết bị chẩn đoán.
2.9.5. Chức năng an toàn.
Nếu ECU tiếp tục điều khiển động cơ dựa trên các tín hiệu sai, sẽ xẩy ra các hư hỏng khác cho động cơ. Để tránh các hư hỏng như vậy, chức năng an toàn của ECU hoặc là dùng các dữ liệu lưu trong bộ nhớ của ECU để cho phép hệ thống điều khiển động cơ tiếp tục hoạt động hay ngừng động cơ nếu nguy hiểm có thể xảy ra.
Bảng sau mô tả các hư hỏng có thể xảy ra khi có trục trặc trong các mạch khác nhau, và phản ứng của chức năng an toàn.
| MẠCH CÓ TÍN | HOẠT ĐỘNG | |
| HIỆU KHÔNG | TÍNH CẦN THIẾT | |
| BÌNH THƯỜNG | ||
| Nếu hư hỏng xẩy ra | Ngưng phun nhiên liệu | |||
| trong hệ thống đánh lửa | ||||
| Mạch tín hiệu xác | và không thể đánh | |||
| nhận đán lửa(IGF) | lửa(tín hiệu xác nhận | |||
| đánh lửa IGF không đến | ||||
| được ECU) | ||||
| Nếu có hở hay ngắn | Một giá trị cố định (tiêu chuẩn) | |||
| mạch xẩy ra trong mạch | xác định tại thời điểm khởi | |||
| tín hiệu cảm biến áp suất | động bằng trạng thái của tiếp | |||
| Mạch tín hiệu cảm | đường ống nạp,không | điểm không tải được sử dụng | ||
| thể tính toán được | để làm khoảng thời gian phun | |||
| biến áp suất đường | ||||
| khoảng thời gian phun | cơ bản và thời điểm đánh lửa | |||
| ống nạp (PIM) | ||||
| cơ bản, kết quả là động | để cho phép động cơ hoạt động. | |||
| cơ bị chết máy hay | ||||
| không thể khởi động lại | ||||
| được. | ||||
| Nếu hở hay ngắn mạch | Dùng giá ịtr hoạt động bình | |||
| xẩy ra trong mạch tín | thường (giá trị tiêu chuẩn). Giá | |||
| • | Mạch tín | hiệu nhiệt độ nước làm | trị tiêu chuẩn này khác nhau tùy | |
| hiệu cảm biến nhiệt | mát hay khí nạp. ECU sẽ | theo kiểu động cơ nhưng thông | ||
| độ nước làm mát | giả thiết rằng nhiệt độ là | thường nhiệt độ nước làm mát | ||
| (THW). | -50°C hay cao hơn | là 80°C và khí nạp là 20°C. | ||
| • | Mạch tín | 139°C.Điều này sẽ dẫ̃n | ||
| hiệu cảm biến nhiệt | đến tỷ lệ hỗn hợp quá | |||
| độ khí nạp(THA). | nhạt hay quá đậm và làm | |||
| cho động cơ chết máy | ||||
| hay chạy không êm. | ||||
Nhận thấy rằng với chức năng an toàn, hoạt động của động cơ không phụ thuộc hoàn toàn vào tín hiệu mà các cảm biến gửi đến ECU. Ví dụ như khi xẩy ra hư hỏng ở xa nơi có trạm sửa chữa hay động cơ đang chạy trên đường. Chức năng an toàn vẫ̃n có thể làm hoạt động động cơ mà không cần tín hiệu từ mạch tín hiệu bị hư hỏng. Bản thân trong bộ nhớ của vi điều khiển
lưu trữ thông tin về dạng tín hiệu cơ bản. Khi xẩy ra hỏng ở mạch tín hiệu nào, vi điều khiển sẽ xuất ra tín hiệu thay thế giúp động cơ tiếp tục hoạt động. Tất nhiên động cơ sẽ không thể hoạt động tốt như khi chưa xẩy ra hư hỏng do tín hiệu mà tự bản thân ECU có không mô tả thực tế tình trạng hiện thời của động cơ.
2.9.6. Chức năng lưu dự phòng.
Chức năng lưu dự phòng là một hệ thống mà bật IC lưu dự phòng để lấy các điều khiển tín hiệu cố định (các giá trị̣ khá́c nhau tuy theo kiểu động cơ) nếu hư hỏng xẩy ra bên trong ECU. Điều này cho phép xe tiếp tục hoạt động, mặc dù nó chỉ đảm bảo các chức năng cơ bản, mà không thể đạt được các tính năng như khi bình thường.
Điều khiển bằng IC lưu dự phòng là một IC sử dụng các dữ liệu đã được lập trình từ trước để điều khiển thời điểm đánh lửa và khoảng thời gian phun nhiên liệu.
Trong trường hợp động cơ D-EFI (5A-FE) thông thường, khi tín hiệu áp suất đường ốn g nạp (PIM) bị hở hay ngắn mạch, bộ vi sử lý sẽ chuyển cưỡng bức sang chế độ lưu dự phòng bằng cách ngắt tín hiệu thời điểm đánh lửa (IGT). Tuy nhiên gần đây, các giá trị cố định về khoảng thời gian phun và thời điểm đánh lửa được lưu trong bộ vi xử lý. Kết quả là, hư hỏng như trên xẩy ra, bộ vi xử lý điều khiển ECU bằng chức năng an toàn.
- Vậy có thể hiểu với động cơ 5A-FE, điều khiển ECU bằng vi điều khiển. Có bộ nhớ trong lưu trữ các thông số cơ bản phục vụ cho việc hoạt động của động cơ. Thì chức năng an toán và chức năng lưu dự phòng là một.
2.10. HỆ THỐNG CHẨN ĐOÁN THỐNG NHẤT TÍCH HỢP OBD 2 (on board diagnostic system, generation 2).
Từ năm 1996 các hãng xản suất ôtô cho ra đời hệ thống OBD 2. OBD 2 Mang tính thống nhất về tiêu chuẩn chẩn đoán và xác định hư hỏng giữa các loại động cơ do các hãng khác nhau chế tạo. Được thống nhất và áp dụng đầu tiên tại Mỹ. Với mục đích nhắm phát hiện các chất có hại trong khí xả thải vào khí quyển, hệ thống OBD cho phép ECU động cơ phát hiện bất kỳ hư hỏng nào của động cơ và hệ thống kiểm soát khí xả cũng như báo cho lái xe các trạng thái này qua đè̀n “check engine”. Một chức năng của ECU động cơ để lưu các dữ liệu điều khiển quan trọng vào bộ nhớ trong khi phát hiện thấy
hư hỏng. Đặc điểm chính của OBD 2 là tính thống nhất của mã chẩn đoán và sử dụng một dụng cụ thử đặc biệt. Kết quả là, phương thức thông tin giữa dụng cụ thử và DLC (giắc nối liên kết dữ liệu) và ECU động cơ được tiêu chuẩn hóa. Hơn nữa, trong trường hợp OBD 2 , việc đo tốc độ động cơ và kiểm tra chức năng của ECU động cơ không thể thực hiện được mà không có dụng cụ thử đặc biệt. Toyota sử dụng hệ thống mà các chức năng ban đầu của nó được bổ sung thêm các yêu cầu theo tiêu chuẩn OBD 2. Các mô tả sau là một số điểm khác nhau cơ bản giữa hệ thống OBD thông thường của Toyota và hệ thống OBD mới (OBD 2) dùng cho các xe ở Mỹ và Canada.
Các Nét Đặc Trưng Của OBD II
Chức Năng Giám Sát Và Kiểm Tra
Tăng Khả Năng Chẩn Đoán Cản
Biến Oxy
Nâng Cao Chẩn Đoán Hệ Thống
Nhiên Liệu
Phát Hiện Động Cơ Bỏ Máy
Giám Sát Bộ Trung Hòa Khí Thải
Giám Sát Hồi Lưu Khí Thải
Làm Sạch Dòng Chảy Hơi Nhiên
Liệu
Giám Sát Không Khí Phụ
Nguyên Tắc Đè̀n Báo Kiểu Mới
Tiêu Chuẩn
Mã Chẩn Đoán
Dữ Liệu Nối Tiếp
Dụng Cụ Kiểm Tra
Hình 2.24. Các chức năng của OBD 2.
- Chẩn đoán cảm biến oxy: Tăng khả năng chẩn đoán cảm biến oxy bao gồm việc giám sát sự suy giảm chức năng và bám bẩn của cảm
biến. Bằng việc giám sát tần số đóng cắt mạch của cảm biến oxy theo tỷ lệ không khí/nhiên liệu tăng hay giảm.
- Giám sát hệ thống nhiên liệu: Khi có điều kiện xẩy ra mà nguyên nhân ở bên ngoài việc điều hành của các thông số thiết kế. Ví dụ : Tín hiệu lưu lựợng không khí bị méo (nhiễu), áp suất nhiên liệu không đúng ,hoặc các vấn đề kỹ thuật khác. Hệ thống OBD II đưa ra dò tìm sự không bình thường của điều kiện điều hành. Nếu điều kiện được tìm thấy dài hơn thực tế lý thuyết. Một DTC đã đựơc lưu trữ. Khi một DTC được lưu trữ ,vận tốc động cơ, tải, và tình trạng động cơ trước đó, được lấy ra qua đường truyền nối tiếp.
- Giám sát động cơ bỏ máy: Bằng việc sử dụng tín hiệu tần số cao vị trí trục cam, ECU giám sát được vận tốc của nó ngay cả khi ở thì sinh công. Khi một máy sinh công tốc độ của nó tại thời điểm đó tăng lên.
Toyota OBD II sử dụng 36 – 2 răng cảm biến trục cam để trực tiếp đo vận tốc và vị trí trục cam. Thông tin được xử lý trong ECU để phát hiện ra xylanh bỏ máy và góc bỏ máy.
- Giám sát bộ trung hòa khí t hải:(ví dụ 2 phần hệ thống tự chẩn đoá́n)
- Giám sát hồi lưu khí thải: Giám sát việc mở van hồi lưu khí thải,
để đưa một phần khí thải quay trở lại buồng đốt nhằm mục đích giảm lượng khí thải độc hại NOx .
- Giám sát hệ thống không khí phụ: Xác định lượng không khí để đưa vào đường ống xả, nơi có bộ phận trung hòa khí thải. Với mục
đích cung cấp oxy cho quá trình phản ứng trung hòa CO, HC và
NOx.
- Báo lỗi bằng đèn nhấp nháy: Khi một lỗi được thiết lập đè̀n kiểm tra sẽ bật sáng nhấp nháy liên tục để chỉ thị mã lỗi. Hệ thống OBD II có thể chỉ dập tắt đè̀n báo hư hỏng nếu hư hỏng không tái xẩy ra trong 3 chu kỳ tiếp theo. Hệ thống OBD II có thể chỉ hủy một lưu trữ DTC nếu hư hỏng không được phát hiện trong 4 chu kỳ liên tiếp. Hệ thống Toyota không xóa mã, nhưng đúng hơn là ắmc cờ đánh dấu nếu hư hỏng không tái xẩy ra trong 40 chu kỳ máy liên tiếp.
- DTC có thể đượ̣c xóa bằng thiết bị̣ giao tiếp bên ngoài hoặc thá́o cực accu ra.
- Readiness test: Hệ thống chẩn đoán OBD II liên tục giám sát động cơ bỏ máy và sai hỏng của hệ thống nhiên liệu. Nó cũng thi hành chức năng kiểm tra trung hòa khí thải, hệ thống hồi lưu khí thải, và các cảm biến oxy trong một hay mọi chu kỳ. Tất nhiên khi tiến hành kiểm tra động cơ phải ở trạng thái hoạt động đúng theo danh nghĩa : nhiệt độ động cơ phải đúng quy định, góc bướm ga mở theo quy định, động cơ phải chịu tải theo quy định.
ECU sẽ cung cấp cá́c thông tin về tình trạng củ̉a động cơ ra một thiết bị̣ bên ngoài dướ́i dạng.
Hình 2.25. Hiển thị thông số giám sát động cơ.
- Stored Engine Freeze Frame Data: Nhờ vào việc phát hiện ra các sai hỏng, hệ thống OBD II sẽ lưu trữ tất cả các dữ liệu vào thời điểm
mà DTC thiết lập. Stored Engine Freeze Frame Data có thể lấy lại được các thông số bằng thiết bị bên ngoài (scan tool).
Scan tool: ECU củ̉a OBD 2 cho phép ghép nối vớ́i cá́c thiết bị̣ (má́y tính) bên ngoài. Hoặc các thiết bị̣ cầm tay phục vụ việc ghi nhậ̣n cá́c thông số gửi ra từ̀ ECU củ̉a động cơ.
Hình 2.26. Hiển thi thông số chẩn đoán.
OBD II sử dụng loại mã chẩn đoá́n mớ́i :
Nhậ̣n thấy trên hình vẽ : P0100 – Sai chức năng của MAP hoặc VAF.
P0110 – Sai chức năng của cảm biến khí nạp.
Mã lỗi : 110 . Hệ thống nhiên liệu : mở .
Nhiệt độ nước làm mát : 203° F….
PHẦN III
CHẨN ĐOÁN VÀ KẾT NỐI VỚI
THIẾT BỊ KIỂM TRA
3.1. KIỂM TRA CHẨN ĐOÁN KHI KHÔNG DÙNG THIẾT BỊ KIỂM TRA.
Quy trình chẩn đoán bằng đèn kiểm tra động cơ.
Đè̀n kiểm tra được thiết lập khi khóa điện ở vị trí On và động cơ không
chạy.
Khi động cơ đã khởi động, đè̀n kiểm tra sẽ tắt. Nếu đè̀n vẫ̃n sáng, có nghĩa hệ thống chẩn đoán đã phát hiện ra một hoạt động sai chức năng hoặc hư hỏng trong hệ thống.
- Để đạt được việc đưa ra mã chẩn đoán cần có các điều sau.
- Điện áp acquy ≥ 11Vol .
- Bướm ga đóng hoàn toàn (cảm biến vị̣ trí bướ́m ga đóng ở cực
IDL).
- Số tự động bật công tắc vị trí số không.
- Các công tắc phụ khác ở vị trí off.
- Động cơ đạt đến nhiệt độ hoạt động bình thường.
- Bật công tắc đánh lửa ở vị trí On. Không khởi động động cơ.
- Sử dụng dây điện kim loại, nối ngắn cực T và cực E1 của check connector.
Hình 3.1. Nối cực T và E1.
- Đọc mã chẩn đoán bằng số lần nhấp nháy của đèn kiểm tra.
- Hệ thống họat động bình thường:
Đè̀n nháy sáng liên tục mỗi lần 0,25 s ( giây ).
Hình 3.2. Mã chẩn đoán.
- Báo mã lỗi:
Hình vẽ bên mô tả việc báo lỗi 21 và lỗi 32. Lỗi 21 đựơc báo trước và cách lỗi 32 là 2,5 giây. Khi báo hết các lỗi sẽ có 4,5 giây chờ để hệ thống báo lại.
Hình 3.3. Mã chẩn đoán.
Sau khi nhận được mã lỗi, so sánh với bảng mã lỗi trong tài liệu đi kè̀m với loại xe và động cơ để chẩn đoán được nguyên nhân và vùng hư hỏng .
Mộ̣t số́ mã chẩn đoá́n và̀ ý nghĩa của chúng :
| Mã | Số Lần Nháy | Mạch | Đè̀n kiểm | Chẩn Đoán (ý nghĩa | Vùng Hư | |||||||||||||||||||||||
| số | Đè̀n | Điện | tra | của mã lỗi) | Hỏng | |||||||||||||||||||||||
| BT | Th | |||||||||||||||||||||||||||
| Bình | – | – | Phát ra khi không | |||||||||||||||||||||||||
| – | có mã nào được | |||||||||||||||||||||||||||
| thường | ||||||||||||||||||||||||||||
| phát hiện. | ||||||||||||||||||||||||||||
| . Không có tín hiệu | . Hở hay | |||||||||||||||||||||||||||
| NE đến ECU trong | ||||||||||||||||||||||||||||
| ngắn mạch | ||||||||||||||||||||||||||||
| vòng 2 giây sau khi | ||||||||||||||||||||||||||||
| NE,G. | ||||||||||||||||||||||||||||
| Tín hiệu | On | N.A | động cơ đã quay. | |||||||||||||||||||||||||
| 12 | . Hở hay | |||||||||||||||||||||||||||
| RPM | . Không có tín hiệu | |||||||||||||||||||||||||||
| ngắn mạch | ||||||||||||||||||||||||||||
| G đến ECU trong 3 | ||||||||||||||||||||||||||||
| STA. | ||||||||||||||||||||||||||||
| giây khi tốc độ động | ||||||||||||||||||||||||||||
| . ECU. | ||||||||||||||||||||||||||||
| cơ từ 600-4000v/p. | ||||||||||||||||||||||||||||
| Không có tín hiệu | ||||||||||||||||||||||||||||
| On | N.A | NE đến ECU khi | ||||||||||||||||||||||||||
| tốc độ động cơ trên | ||||||||||||||||||||||||||||
| 1500v/p. | . Hở hay | |||||||||||||||||||||||||||
| Tín hiệu | ngắn mạch | |||||||||||||||||||||||||||
| 13 | Không có tín hiệu G | |||||||||||||||||||||||||||
| RPM | đến ECU trong khi | NE. | ||||||||||||||||||||||||||
| tín hiệu NE đến | . ECU. | |||||||||||||||||||||||||||
| N.A | ON | ECU 4 lần và tốc độ | ||||||||||||||||||||||||||
| động cơ từ 500 đến | ||||||||||||||||||||||||||||
| 4000 v/p. | ||||||||||||||||||||||||||||
| . Hở hay | ||||||||||||||||||||||||||||
| ngắn mạch | ||||||||||||||||||||||||||||
| Tín hiệu | Không có tín hiệu | IGF hay | ||||||||||||||||||||||||||
| 14 | On | N.A | IGF đến ECU 4 lần | IGT từ từ | ||||||||||||||||||||||||
| đánh lửa | ||||||||||||||||||||||||||||
| liên tiếp. | IC đánh lửa | |||||||||||||||||||||||||||
| đến ECU. | ||||||||||||||||||||||||||||
| . IC đánh | ||||||||||||||||||||||||||||
| lửa. | |||||||||||||||||||||||||
| . ECU | |||||||||||||||||||||||||
| . Hở hay | |||||||||||||||||||||||||
| ngắn mạch | |||||||||||||||||||||||||
| Hở hay ngắn mạch | bộ sấy cảm | ||||||||||||||||||||||||
| N.A | dây bộ sấy cảm biến | biến oxy. | |||||||||||||||||||||||
| oxy(HT) | . Bộ sấy | ||||||||||||||||||||||||
| Mạch | cảm biến. | ||||||||||||||||||||||||
| Off | . ECU | ||||||||||||||||||||||||
| 21 | cảm | ||||||||||||||||||||||||
| . Hở hay | |||||||||||||||||||||||||
| biến oxy | Trong quá trình | ||||||||||||||||||||||||
| ngắn mạch | |||||||||||||||||||||||||
| phản hồi tỷ lệ khí- | |||||||||||||||||||||||||
| cảm biến | |||||||||||||||||||||||||
| nhiên liệu, điện áp | |||||||||||||||||||||||||
| On | oxy. | ||||||||||||||||||||||||
| ra của cảm biến oxy | |||||||||||||||||||||||||
| . Cảm biến | |||||||||||||||||||||||||
| liên tục từ 0,35 – | |||||||||||||||||||||||||
| oxy. | |||||||||||||||||||||||||
| 0,7V. | |||||||||||||||||||||||||
| . ECU | |||||||||||||||||||||||||
| . Hở hay | |||||||||||||||||||||||||
| ngắn mạch | |||||||||||||||||||||||||
| Mạch | trong mạch | ||||||||||||||||||||||||
| Hở hay ngắn mạch | cảm biến | ||||||||||||||||||||||||
| cảm | |||||||||||||||||||||||||
| On | On | trong mạch tín hiệu | nhiệt độ | ||||||||||||||||||||||
| 22 | biến | ||||||||||||||||||||||||
| nhiệt độ nước | nước. | ||||||||||||||||||||||||
| nhiệt độ | |||||||||||||||||||||||||
| (THW). | . Cảm biến | ||||||||||||||||||||||||
| nước | |||||||||||||||||||||||||
| nhiệt độ | |||||||||||||||||||||||||
| nước. | |||||||||||||||||||||||||
| . ECU | |||||||||||||||||||||||||
| Mạch | . Hở hay | ||||||||||||||||||||||||
| Hở hay ngắn mạch | ngắn mạch | ||||||||||||||||||||||||
| cảm | |||||||||||||||||||||||||
| Off | On | trong tín hiệu cảm | trong mạch | ||||||||||||||||||||||
| 24 | biến | ||||||||||||||||||||||||
| biến nhiệt độ khí | cảm biến | ||||||||||||||||||||||||
| nhiệt độ | |||||||||||||||||||||||||
| nạp (THA). | nhiệt độ | ||||||||||||||||||||||||
| khí nạp | |||||||||||||||||||||||||
| khí nạp. | |||||||||||||||||||||||||
| . Cảm biến | ||||||||||||||||||||||
| nhiệt độ | ||||||||||||||||||||||
| khí nạp. | ||||||||||||||||||||||
| . ECU | ||||||||||||||||||||||
| . Lỏng | ||||||||||||||||||||||
| bulong nối | ||||||||||||||||||||||
| đất động | ||||||||||||||||||||||
| cơ. | ||||||||||||||||||||||
| . Hở mạch | ||||||||||||||||||||||
| E1. | ||||||||||||||||||||||
| Điện áp ra của cảm | . Hở mạch | |||||||||||||||||||||
| Hư hỏng | vòi phun. | |||||||||||||||||||||
| biến oxy nhỏ hơn | ||||||||||||||||||||||
| chức | . Áp suất | |||||||||||||||||||||
| điện áp 0,45 V trong | ||||||||||||||||||||||
| năng | đường | |||||||||||||||||||||
| Off | On | ít nhất 90 giây hay | ||||||||||||||||||||
| 25 | làm nhạt | nhiên (tắc | ||||||||||||||||||||
| hơn khi cảm biến | ||||||||||||||||||||||
| tỷ lệ | vòi phun). | |||||||||||||||||||||
| oxy được sấy nóng | ||||||||||||||||||||||
| khí- | . Hở hay | |||||||||||||||||||||
| (tăng tốc khoản | ||||||||||||||||||||||
| xăng | ngắn mạch | |||||||||||||||||||||
| 200v/p) | ||||||||||||||||||||||
| trong mạch | ||||||||||||||||||||||
| cảm biến | ||||||||||||||||||||||
| ôxy. | ||||||||||||||||||||||
| . Cảm biến | ||||||||||||||||||||||
| oxy. | ||||||||||||||||||||||
| . Hệ thống | ||||||||||||||||||||||
| đánh lửa. | ||||||||||||||||||||||
| . Hở hay | ||||||||||||||||||||||
| Tín hiệu | Hở hay ngắn mạch | ngắn mạch | ||||||||||||||||||||
| trong mạch | ||||||||||||||||||||||
| cảm | trong mạch tín hiệu | |||||||||||||||||||||
| On | On | cảm biến | ||||||||||||||||||||
| 31 | biến | cảm biến áp suất | ||||||||||||||||||||
| chân | ||||||||||||||||||||||
| chân | đường ống | |||||||||||||||||||||
| không. | ||||||||||||||||||||||
| không | nạp(PIM). | |||||||||||||||||||||
| . Cảm biến | ||||||||||||||||||||||
| chân | ||||||||||||||||||||||
| không. | ||||||||||||||||||||||||||||
| . ECU | ||||||||||||||||||||||||||||
| . Hở hay | ||||||||||||||||||||||||||||
| ngắn mạch | ||||||||||||||||||||||||||||
| Tín hiệu | Hở hay ngắn mạch | mạch cảm | ||||||||||||||||||||||||||
| cảm | biến vị trí | |||||||||||||||||||||||||||
| trong tín hiệu cảm | ||||||||||||||||||||||||||||
| 41 | biến vị | Off | On | bướm ga. | ||||||||||||||||||||||||
| biến vị trí bướm ga | ||||||||||||||||||||||||||||
| trí bướm | . Cảm biến | |||||||||||||||||||||||||||
| (VTA). | ||||||||||||||||||||||||||||
| ga | vị trí bướm | |||||||||||||||||||||||||||
| ga. | ||||||||||||||||||||||||||||
| . ECU | ||||||||||||||||||||||||||||
| Không có tín hiệu | . Hở hay | |||||||||||||||||||||||||||
| Off | N.A | SPD đến ECU trong | ngắn mạch | |||||||||||||||||||||||||
| Tín hiệu | 8 giây khi xe đang | trong mạch | ||||||||||||||||||||||||||
| 42 | cảm | chạy. | cảm biến | |||||||||||||||||||||||||
| biến tốc | tốc độ xe. | |||||||||||||||||||||||||||
| Không có tín hiệu | ||||||||||||||||||||||||||||
| độ xe | . Cảm biến | |||||||||||||||||||||||||||
| SPD đến ECU sau | ||||||||||||||||||||||||||||
| tốc độ xe. | ||||||||||||||||||||||||||||
| khi bật khóa điện. | ||||||||||||||||||||||||||||
| . ECU | ||||||||||||||||||||||||||||
| . Hở hay | ||||||||||||||||||||||||||||
| ngắn mạch | ||||||||||||||||||||||||||||
| tín hiệu | ||||||||||||||||||||||||||||
| Tín hiệu | Không có tín hiệu | máy khởi | ||||||||||||||||||||||||||
| 43 | máy | N.A | Off | STA đến ECU | động. | |||||||||||||||||||||||
| khởi | saukhi bật khóa | . Hở hay | ||||||||||||||||||||||||||
| động | điện. | ngắn mạch | ||||||||||||||||||||||||||
| IG SW hay | ||||||||||||||||||||||||||||
| rơle chính. | ||||||||||||||||||||||||||||
| . ECU | ||||||||||||||||||||||||||||
| Tín hiệu | N.A | Off | Khi tốc độ động cơ | . Hở hay | ||||||||||||||||||||||||
| 52 | cảm | giữa 1200 và | ngắn mạch | |||||||||||||||||||||||||
| biến | 6000v/p. Tín hiệu từ | tín hiệu | ||||||||||||||||||||||||||
| tiếng gõ̃ | cảm biến tiếng gõ̃ | cảm biến | |||||||||||||||||
| không đến ECU | tiếng gõ̃. | ||||||||||||||||||
| trong một khoảng | (Động cơ | ||||||||||||||||||
| thời gian nhất định | 5A-FE | ||||||||||||||||||
| (KNK) .(Động cơ | không có | ||||||||||||||||||
| 5A-FE không có | cảm biến | ||||||||||||||||||
| cảm biến này) | này) | ||||||||||||||||||
| N.A | Off | . Hệ thống | |||||||||||||||||
| công tắc | |||||||||||||||||||
| Xuất hiện khi A/C | A/C. | ||||||||||||||||||
| Tín hiệu | bật ,tiếp điểm IDL | . Mạch IDL | |||||||||||||||||
| 51 | tình | mở hay cần số ở vị | của cảm | ||||||||||||||||
| *5 | trạng | trí R,D,2 hay L và | biến vị trí | ||||||||||||||||
| công tắc | STA tắt khi nối TE1 | bướm ga . | |||||||||||||||||
| và E1 ở chế độ thử. | . Bàn đạp | ||||||||||||||||||
| ga. | |||||||||||||||||||
| . ECU | |||||||||||||||||||
BT : Bình thuờng.
TH : Thử.
On : Trong cột chế độ chẩn đoá́n chỉ̉ ra rằng đèn kiểm tra động cơ bậ̣t sá́ng khi phát hiện có mã lỗi.
Off : Chỉ̉ ra rằng đèn kiểm tra động cơ không bậ̣t sá́ng trong quá́ trình chẩn đoá́n hư hỏng thậ̣m chí phá́t hiện thấy hư hỏng .
N.A : Chỉ̉ ra rằng hạng mục này không bao gòm trong chẩn đoá́n hư hỏng Chú ý : Cách bậ̣t sá́ng đèn kiểm tra động cơ (check engine) thay đổi tùy thuộc vào kiểu động cơ và thị̣ trừ̀ơng .
- Xóa mã chẩn đoán.
- Sau khi sửa chữa được vị trí hư hỏng,mã chẩn đoán vẫ̃n còn lưu lại trong bộ nhớ bởi vậy ECU phải xóa nó bằng việc tháo cầu chì 15A trong hộp cầu chì. Khóa điện ở vị trí off.
Chú ý : Việc hủy mã chẩn đoán cũng có thể làm bằng cách tháo cực âm(-) accu, nhưng ằngb cách này, các hệ thống nhớ khác (đồng hồ,etc…) cũng sẽ bị xóa theo.
- Nếu mã chẩn đoán không được xóa đi, nó sẽ vẫ̃n tồn tại trong ECU và xuất hiện cùng với mã chẩn đoán mới trong việc chẩn đoán ở lần sau.
- Nếu việc sửa chữa cần thiết phải tháo accu, việc kiểm tra đầu tiên là phải quan sát nếu mã chẩn đoán đã được ghi lại.
- Sau khi xóa mã chẩn đoán song,chạy thử xe để kiểm tra xem có một mã chẩn đoán báo xe chạy bình thường phát ra không. Nếu vẫ̃n có mã giống như trước khi sửa chữa xuất hiện, thì chắc rằng hư hỏng đã không được sửa chữa đúng.
Ø Chú ý rằng trong quá́ trình lấy mã chẩn đoá́n bằng đèn kiểm tra cũng gặp phải những vấn đề sau: Không tự suất mã chẩn đoán : Trong một số trường hợp hệ thống tự chẩn đoán không phát huy chức năng của mình. Như đè̀n kiểm tra không sáng hoặc hệ thống không báo mã chẩn đoán. Các nguyên nhân có thể do bóng đè̀n bị cháy, đứt dây hoặc hỏng ECU.
3.2. CHẨN ĐOÁN BẰNG ĐO ĐIỆN ÁP.
Hệ thống tự chẩn đoán không có khả năng dò tìm ra các mạch cảm biến mà nó đưa thông tin không chính xác (ngoài phạm vi thông tin) đến ECU. Sử dụng điện áp giữa các cực liên kết đến các cảm biến. Đo tín hiệu điện áp đó để so sánh với thông số tiêu chuẩn của nhà sản xuất. Nếu giá trị đo được không giống với nhà sản xuất thì chứng tỏ có sự sai hỏng trong mạch.
3.2.1. Sử dụng cực VF để giám sát chu trình:
- Cực T nối với E1.
- Cực IDL không đóng ( bướ́m ga mở ).
Khi các điều kiện được thỏa mãn tín hiệu điện áp tại cực VF sẽ mô phỏng tín hiệu cảm biến oxy. Mỗi lần tín hiệu cảm biến oxy là cao, biểu thị trạng thái giầu khí thải, điện áp tại cực VF là 5V. Khi tín hiệu cảm biến oxy là thấp, biểu thị trạng thái nghèo khí thải, điện áp tại cực VF là 0V.
- vận tốc 2500 vòng/phút, cảm biến oxy chưa hoạt động trong 8 đến 10 giây nếu chu trình hoạt động bình thường. Để kiểm tra, động cơ phải đạt nhiệt độ quy định và chạy ở vận tốc 2500 vòng/phút trong một phút và chắc rằng cảm biến oxy đã đạt đến nhiệt độ điều hành.
Hình 3.4. So sánh điện áp cảm biến oxy và điện áp cực VF.
3.2.2. Sử dụng cực VF xác định tỷ lệ không /khí nhiên liệu.
Cực VF cũng được sử dụng vào chức năng chẩn đoán và phụ thuộc và trạng thái của cực T. Khi cực T là off, điện áp tại cực VF mô tả giá trị thông số sửa chữa. Khi cực T là on, cực VF chỉ thể hiện một là tín hiệu cảm biến oxy (bướm ga mở) hoặc là cho biết mã chẩn đoán được lưu trong bộ nhớ của ECU (bướm ga đóng). Mức độ hiệu chỉnh phản hồi tỷ lệ khí – nhiên liệu được phát ra theo 3 hay 5 mức tù cực VF hay VF1 của giắc kiểm tra. Khi giá trị này là bình thường, tín hiệu ra cố định tại 2,5V, nó chỉ ra rằng hiệu chỉnh phản hồi ở phía gia tăng, còn nếu thấp hơn 2,5V chỉ ra rằng hiệu chỉnh phản hồi ở phía suy giảm.
Hình 3.5. Điện áp xác định tỷ lệ không khí/nhiên liệu.
- 5A-FE là động cơ phun xăng loại D .
3.3. KIỂM TRA CHẨN ĐOÁN BẰNG THIẾT BỊ: KÕt nèi víi thiÕt bÞ kiÓm tra chuyªn dïng qua cæng DLC ( Diagnostics Link connector ).
3.3.1. Cách thức kết nối và cách sử dụng Diagnostics Tester: Lµ thiÕt bÞ do h·ng Toyota chÕ t¹o .
Các dữ liệu truyền từ ECU đến thiết bị kiểm tra: Nhiệt độ nước làm mát, vận tốc động cơ, góc đánh lửa sớm, vị trí bướm ga, cảm biến oxy…
Động cơ 5A-FE ra đời trong những năm 1988 do đó hệ thống tự chẩn đoán chưa hỗ trợ được phát hiện nhiều lỗi và các thông số của động cơ, khi đưa ra chưa đầy đủ so với các hệ thống cùng chức năng sau này.
Hình 3.6. Truyền dữ liệu từ ECU sang thiết bị chẩn đoán.
Với động cơ 5A –FE chỉ hỗ trợ một cổng kết nối là check connector (DLC1: data link connector 1). Trong đó cực W điều khiển phát sáng đè̀n chẩn đoán. Với thiết bị diagnostic tester do hãng Toyota chế tạo sẽ nhận dữ liệu tại cực VF của DLC.
Hình 3.7. Kết nối ECU đến DLC.
Trong trường hợp những loại xe sản xuất khoảng những năm 1989 không hỗ trợ truyền dữ liệu nối tiếp, sẽ có thêm một bộ phận khác là : vehicle break – out box. Cho phép tạo ra tín hiệu nối tiếp khi kết nối thiết bị đó với ECU. Thông tin từ các sợi dây điện sẽ được phát đi và hiển thị bởi diagnostic tester.
Hình 3.8. Kết nối qua thiết bị chuyển đổi A/D.
3.3.2. Đọc thông tin trên màn hình của thiết bị.
Hình 3.9. Liệt kê thông tin trên màn hình.
Với OBD sẽ có khoảng 20 thông tin đựơc liệt kê trên màn hình.
Bao gồm : Injector: thời gian xung phun xăng hiện tại của kim phun.
Ignition: góc đánh lửa sớm.
Engine spd: vận tốc động cơ.
Throttle: góc mở bướm ga.
Vehicle spd: vận tốc trục thứ cấp của hộp số.
Tình trạng của các tiếp điểm công tắc: A/C,A/F,STA…
Khi tiến hành chẩn đoán diagnostic tester đọc số lần có xung điện áp tại cực W. Bởi vậy việc xử lý mã chẩn đoán khá là chậm khi có nhiều hư hỏng đựơc phát hiện.
- Ngày nay trên các xe hiện đại trang bị̣ những cổng kết nối từ̀ ECU củ̉a xe, cung cấp đầy đủ̉ dữ liệu về tình trạng củ̉a xe. Dữ liệu cũng có sự thống nhất về cá́ch thức gửi và nhậ̣n. Do đó trên thị̣ trường có rất nhi ều loại thiết bị̣ kiểm tra chẩn đoá́n mà có thể sử dụng cho nhiều loại xe. Kèm theo đó cá́c nhà sản xuất còn cung cấp cá́c phần mềm tạo giao diện đẹp và dễ sử dụng. Hơn thế nữa cá́c thiết bị̣ còn có thể kết nối vớ́i mạng internet đến nhà sản xuất, để tải cá́c chỉ̉ tiêu kỹ thuậ̣t mớ́i nhất phục vụ cho kiểm tra chẩn đoá́n.
3.3.3. Các loại cổng kết nối.
Tùy theo loại động cơ và phụ thuộc vào thời điểm sản xuất mà các nhà sản xuất đưa ra số lượng và hình thức của các công chẩn đoán.
Động Cơ 5A-FE: chỉ có 1 cổng kết nối DLC.
Các động cơ phát triển sau thường có 2 cổng kết nối: DLC 1 và DLC 2
Hình 3.10. Cổng kết nối.
Hai cổng có các cực giống nhau. Nhưng với DLC 1 hỗ trỡ việc nối ngắn cực và đo bằng đồng hồ đo thông thường. DLC 2 sử dụng để kết nối với thiết bị bên ngoài (scan tool).
Các động cơ có hỗ trợ OBD II . Có các loại cổng kết nối riêng cho mỗi loại động cơ, tùy thuộc vào nhà sản xuất.
Yêu cầu truyền dữ liệu
từ santool
ECU truyền dữ liệu đến scantool
Hình 3.11. Cổng kết nối DLC 3 của Toyota.
3.3.4. Đọc mã chẩn đoán OBD 2.
Với hệ thống OBD 2 thống nhất thể hiện mã chẩn đoán có dạng như sau:
Mã chẩn đoá́n có dạng:
Mã số được hiển thị trên màn hình của thiết bị chẩn đoán mà không phải đếm số lần sáng tối của đè̀n kiểm tra.
| P 0 1 3 7 | ||||||||||||||||||
| B : Phần thân ôtô | Vị trí của hư hỏng | |||||||||||||||||
| C : Phần gầm ôtô | ||||||||||||||||||
| P : Phần động cơ | ||||||||||||||||||
| U : Network (mạng | Vị trí của hư hỏng | |||||||||||||||||
| lưới) | ||||||||||||||||||
0 : Tiêu chuẩn thống
nhất
1 : Đặc trưng cho từng
nhà sản xuất
Hình 2.2.7. Mã chẩn đoán OBD 2.
Mã sẽ bao gồm 5 ký tự :
Ký tự thứ nhất: thể hiện bộ phận được chẩn đoán.
| Ký tự thứ 2 : | |||||
| Nếu là 0: Thể hiện lỗi đó được thống nhất giữa các loại xe. | |||||
| Nếu là 1: Thể hiện lỗi đó chỉ có ở sản phẩm của từng nhà sản xuất. | |||||
| Ký tự thứ 3 : | 1 : Tín hiệu điều khiển (nhiên liệu hoặc không khí). | ||||
| 2 : Mạch kim phun. | 7 : Hộp số. | ||||
| 3 : Đánh lửa hoặc bỏ máy. | 8 : Hộp số. | ||||
| 4 : Phát tín hiệu điều khiển. | 9 : (sử dụng riêng cho SAE) | ||||
| 5 : Vận tốc xe và điều khiển không tải. | |||||
| 6 : Máy tính và mạch xuất tín hiệu. | |||||
| 0 : (sử dụng riêng cho SAE) | |||||
| Mã OBD 2: | |||||
| OBD II | Vùng hư hỏng | OBD | |||
| P1100 | Mạch biểu đồ cảm biến khí nạp | 31 | |||
| P1120 | Cảm biến vị trí chân ga | – | |||
| P1121 | Cảm biến vị trí chân ga/biểu thị suy giảm | – | |||
| P1125 | Mạch điều khiển bướm ga | ||||
| P1126 | Mạch ly hợp điện từ | ||||
| P1127 | Mạch nguồn số tự động | ||||
| P1128 | Điều khiển bướm ga khóa | ||||
| P1129 | Hệ thống điện điều khiển bướm ga | 41 | |||
| P1130 | Mạch cảm biến không khí/nhiên liệu /biểu thị. | 25 | |||
| (hàng 1 cảm biến 1) | |||||
| P1133 | Mạch cảm biến gửi tín hiệu không khí/nhiên liệu. | – | |||
| (hàng 1 cảm biến 1) | |||||
| P1135 | Mạch cảm biến gửi tín hiệu nhiệt độ. (hàng 1 cảm | 22 | |||
| biến 1) | |||||
| P1150 | Mạch cảm biến không khí/nhiên liệu /biểu thị. | – | |||
| (hàng 1 cảm biến 1) | |||||
| P1153 | Mạch cảm biến gửi tín hiệu. (hàng 1 cảm biến 1) | ||
| P1155 | Mạch gửi tín hiệu nhiệt độ. (hàng 1 cảm biến 1) | 24 | |
| P1200 | Mạch rơle bơm xăng. | – | |
| P1300 | Sai chức năng của mạch đánh lửa –No.1 | 14 | |
| P1310 | Sai chức năng của mạch đánh lửa –No.2 | – | |
| P1335 | Không có tín hiệu vị trí trục cam – động cơ đang | 12 | |
| chạy. | |||
| P1349 | Hệ thống VVT | ||
| P1400 | Cảm biến vị trí bướm ga phụ | – | |
| P1401 | Cảm biến vị trí bướm ga phụ /thể hiện hư hỏng | – | |
| P1405 | Cảm biến tăng áp suất nạp | – | |
| P1406 | Cảm biến tăng áp suất nạp/thể hiện hư hỏng | – | |
| P1410 | Sai chức năng của mạch cảm biến vị trí van tuần | – | |
| hoàn khí xả. | |||
| P1411 | Sai chức năng của mạch cảm biến vị trí van tuần | – | |
| hoàn khí xả /hiệu suất . | |||
| P1500 | Mạch tín hiệu khởi động | 43 | |
| P1510 | Mạch điều khiển tăng áp suất | – | |
| P1511 | Áp suất tăng thấp | – | |
| P1512 | Áp suất tăng cao | – | |
| P1520 | Sai chức năng tín hiệu khóa đè̀n dừng | 51*5 | |
| P1565 | Mạch khóa chính điều khiển tiết kiệm | 25 | |
| P1600 | Sai chức năng nguồn BAT đến ECU | – | |
| P1605 | Hỏng CPU điều khiển | – | |
| P1630 | Hệ thống điều khiển bám đất của bánh xe | – | |
| P1633 | ECU ( khối điều khiển trung tâm ) | – | |
| P1652 | Mạch điều khiển van không khí không tải | – | |
| P1656 | Mạch OCV | – | |
| P1658 | Mạch điều khiển van mở khí thừa | – | |
| P1661 | Mạch hồi lưu khí thải | – | |
| P1662 | Mạch điều khiển van hồi lưu khí thải | – | |
| P1780 | Sai chức năng công tác khóa vị trí công tác số | – | |
| không ( số tự động ) | |||
| P0100 | Hở hay ngắn mạch trong mạch tín hiệu cảm biến | 31 | |
| áp suất chân không đường ống nạp (PIM). | |||
| P0110 | Hở hay ngắn mạch trong tín hiệu cảm biến nhiệt độ | 24 | |
| khí nạp. | |||
| P0115 | Hở hay ngắn mạch tín hiệu nhiệt độ nước làm mát. | 22 | |
| P0120 | Hở hay ngắn mạch trong mạch cảm biến vị trí | 41 | |
| bướm ga (VTA). | |||
| P0121 | 41 | ||
| P0130 | Hở hay ngắn mạch dây bộ sấy cảm biến oxy. | 21 | |
| P0135 | 21 | ||
| P0325 | Tín hiệu từ cảm biến tiếng gõ̃ không đến ECU. | 52 | |
| Không có tín hiệu NE đến ECU khi tốc độ động cơ | |||
| P0335 | trên 1500 vòng/phút. | 12,13 | |
| Không có tín hiệu G đến ECU khi tốc độ động cơ | |||
| 500 – 4000 vòng/phút. | |||
| Không có tín hiệu NE đến ECU khi động cơ trong | |||
| P0340 | vòng 2 giây sau khi động cơ đã quay. | 12 | |
| Không có tín hiệu G đến ECU khi tốc độ động cơ | |||
| 600 – 4000 vòng/phút. | |||
| P0500 | Không có tín hiệu SPD. | 42 | |
| P1300 | Không có tín hiệu IGF đến ECU 4 lần lien tiếp. | 14 | |
| P1305 | 15 | ||
| P1310 | 14 | ||
| P1315 | 15 | ||
| P1335 | 13 | |
| P1346 | 18 | |
Nhận thấy rằng hệ thống OBD II trạng bị cho các xe hiện đại, với nhiều hệ thống phụ trợ. Do vậy số lựơng các mã chẩn đoán cũng tăng lên để đáp ứng yêu cầu chẩn đoán với các thiết bị đó.
3.4. PHƯƠNG ÁN KẾT NỐI VỚI THIẾT BỊ HIỂN THỊ MÃ LỖI.
3.4.1. Cơ sở lý thuyết để chế tạo thiết bị.
Nhận thấy khi tiến hành xác định lỗi của động cơ bằng cách đếm số lần sáng, tối của đè̀n. Ta phải đồng thời quan sát đồng hồ để xác định mã lỗi, điều đó rất dễ gây sai sót và có khi phải quan sát nhiều lần do đó gây tốn phí thời gian.
Với động cơ 5A_FE, ECU cung cấp cực W để điều khiển việc tắt mở của đè̀n:
| Cực BATT luôn được nối với | |||
| (+ )Accu để duy trì bộ nhớ | Đến cảm biến | Ổn áp 5 V | |
| Ram | |||
Rơ le chính
Vi điều
khiển
Accu 12V
Rơle tạo tín hiệu
Đến thiết bị hiển thị mã
chẩn đoán
Hình 3.12. Lấy tín hiệu từ chân cực W.
ECU phát các tín hiệu xung đến cực điều khiển Bazơ làm Tranzitor phân cực thuận. Cho phép dòng điện 12V của accu chạy từ cực W đến cực E1 (âm nguồn). Đè̀n kiểm tra mắc nối tiếp giữa + accu và cực W, do đó đè̀n phát sáng theo tín hiệu điều khiển của ECU.
Tín hiệu tại cực W luôn có hai trạng thái đóng và tắt (on/off), tương đương là loại tín hiệu 1 bít (0 hoặc 1). Trạng thái duy trì mỗi bít trong một mã lỗi tùy thuộc vào loại mã 1 số hay 2 số.
Để việc theo dõ̃i mã chẩn đoán được đơn giản sẽ chế tạo một thiết bị nhận tín hiệu từ cực W và báo mã lỗi bằng con số lên led 7 thanh.
3.4.2. Phuơng án chế tạo thiết bị.
Sơ đồ nguyên lý :
Hình 3.13. Sơ đồ khối hiển thị̣ Led 7 đoạn.
- Tín hiệu từ̀ cực W có cá́c dạng:
Hình 3.14. Dạng tín hiệu từ cực W.
Nhận thấy rằng để xác định đựơc mã chẩn đoán là thực hiện việc đếm các nhịp xung hay đếm sự kiện.
- Mã BCD (Binary Coded Decimal).
Mã BCD dùng số nhị phân 4 bit có giá trị tương đương t hay thế cho từng số hạng trong số thập phân.
Thí dụ:
Số 62510 có mã BCD là 0110 0010 0101.
Mã BCD dùng rất thuận lợi : mạch điện tử đọc các số BCD và hiển thị ra bằng đè̀n bảy đoạn (led hoặc LCD) hoàn toàn giống như con người đọc và viết ra số thập phân.
- Hiển thị : Sử dụng Led 7 đoạn để hiển thị mã chẩn đoán,mã chẩn đoán có thể đến số hàng trăm và bao gồm chữ cái.Vậy nên sử dụng 4 Led 7 đoạn.
Hình 3.15. Kết nối Led 7 đoạn.