Đồ án tốt nghiệp Thiết kế nguồn cấp cho động cơ điện một chiều kích từ độc lập có đảo chiều
Mọi ý kiến đóng góp xin gửi vào hòm thư: [email protected]
Kéo xuống để Tải ngay đề cương bản PDF đầy đủ: Sau “mục lục” và “bản xem trước”
(Nếu là đề cương nhiều công thức nên mọi người nên tải về để xem tránh mất công thức)
Đề cương liên quan:Văn Mẫu Phong cách nghệ thuật trong văn chính luận của Hồ Chí Minh qua bản Tuyên ngôn độc lập
[toc]
[pdfviewer width=”800px” height=”1000px” beta=”true/false”]http://hotroontap.com/wp-content/uploads/2019/03/%C4%90%E1%BB%93-%C3%A1n-t%E1%BB%91t-nghi%E1%BB%87p-Thi%E1%BA%BFt-k%E1%BA%BF-ngu%E1%BB%93n-c%E1%BA%A5p-cho-%C4%91%E1%BB%99ng-c%C6%A1-%C4%91i%E1%BB%87n-m%E1%BB%99t-chi%E1%BB%81u-k%C3%ADch-t%E1%BB%AB-%C4%91%E1%BB%99c-l%E1%BA%ADp-c%C3%B3-%C4%91%E1%BA%A3o-chi%E1%BB%81u.pdf[/pdfviewer]
Tải ngay đề cương bản PDF tại đây: Đồ án tốt nghiệp Thiết kế nguồn cấp cho động cơ điện một chiều kích từ độc lập có đảo chiều
LỜI NÓI ĐẦU
Trong những năm gần đây cùng với sự phát triển ngày càng mạnh mẽ của khoa học kỹ thuật thì ứng dụng của điện tử công suất vào các ngành công nghiệp nói chung và công nghiệp điện tử nói riêng. Các thiết bị điện tử có công suất lớn được chế tạo ngày một nhiều và động cơ một chiều được coi là quan trọng và được sử dụng rộng rãi ở nhiều ngành nghề khác nhau. Chủ yếu là được làm động cơ điện, máy phát điện…
Để hiểu rõ được vai trò của ĐTCS và động cơ điện một chiều, thì trong đồ án tốt nghiệp về: Thiết kế nguồn cấp cho động cơ điện một chiều kích từ độc lập có đảo chiều” của em ta sẽ hiểu rõ hơn.
Do kiến thức đã học và kinh nghiệm thực tế còn hạn chế của em thì không tránh khỏi những sai sót, nên kính mong các thầy cô thông cảm và bỏ qua cho em.
Em xin chân thành cảm ơn các thầy cô trong bộ môn TĐHXNCN đặc biệt là thầy giáo TS. Trần Văn Huy đã nhiệt tình hướng dẫn để em hoàn thành đồ án tôt nghiệp này. Em xin chân thành cảm ơn tha
Sinh viên
Nguyễn Ngọc Hợp
CHƯƠNG 1
TỔNG QUAN VỀ ĐỘNG CƠ ĐIỆN MỘT CHIỀU
Ngày nay, mặc dù dòng điện xoay chiều được sử dụng rộng rãi nhưng động cơ điện một chiều vẫn tồn tại. Trong công nghiệp, động cơ điện một chiều được sử dụng ở những nơi yêu cầu mở máy lớn hoặc yêu cầu điều chỉnh tốc độ bằng phẳng và phạm vi rộng. Vì động cơ điện một chiều có đặc tính làm việc rất tốt trên các mặt điều chỉnh tốc độ (phạm vi điều chỉnh rộng, thậm chí từ tốc độ bằng 0).. Động cơ điện một chiều có đặc tính điều chỉnh tôc độ tốt , có nhiều ưu điểm hơn so với một số loại động cơ khác. Không những cấu tạo đơn giản mà còn đạt chất lượng điều chỉnh tốc độ tốt, vì vậy nhiều ngành công nghiệp sử dụng.
1.1 Cấu tạo động cơ điện một chiều:
Động cơ điện một chiều có thể chia làm hai phần chính là: Phần tĩnh (stato)
Phần quay (rôto)
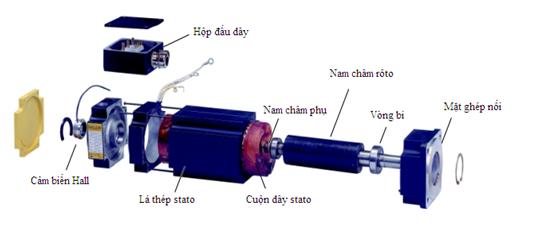
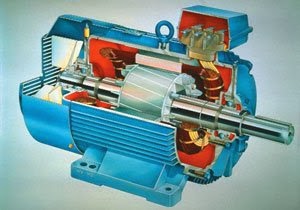
Hình 1-1. Cấu tạo động cơ điện một chiều
1.1.1. Phần tĩnh (stato)
Đây là phần đứng yên của động cơ, bao gồm các bộ phận chính sau:
- Cực từ chính:
Hình 1.2 Cực từ chính
- Cực từ chính: là bộ phận sinh ra từ trường, gồm lõi sắt cực từ và dây quấn kích từ.
- Lõi sắt cực từ làm bằng thép kĩ thuật điện dày ( 0,5 –1)mm ép lại và tán chặt.
- Dây quấn kích từ được quấn bằng dây đồng bọc cách điện.
Trong các máy công suất nhỏ, cực từ chính là một nam châm vĩnh cửu.
Trong các máy công suất trung bình và lớn, cực từ chính là nam châm điện.
- Cực từ phụ:
- Cực từ phụ: đặt giữa cực từ chính và dùng để cải thiện điều kiện làm việc của máy điện và đổi chiều
- Lõi thép cực từ phụ có thể là một khối hoặc có thể được ghép bởi các lá thép tùy theo chế độ làm việc.
Xung quanh cực từ phụ được đặt dây quấn cực từ phụ, dây quấn cực từ phụ được nối với dây quấn phần ứng.
- Gông từ:
- Gông từ: dùng để làm mạch từ nối liền các cực từ đồng thời làm vỏ máy.
- Các bộ phận khác:
– Nắp động cơ: để bảo vệ động cơ khỏi những vật ngoài rơi vào làm hư hỏng dây quấn hay an toàn cho người sử dụng.
– Cơ cấu chổi than: để đưa dòng điện từ phần quay ra ngoài. Cơ cấu chổi than gồm có chổi than đặt trong hộp chổi than và nhờ 1 lò xo tì chặt lên cổ góp. Hộp chổi than được cố định trên giá đỡ chổi than và cách điện với giá.
1.1.2 Phần quay (rôto)
Phần quay (rôto) bao gồm những bộ phận sau:
a.Lõi thép phần ứng: dùng để dẫn từ, thường dùng những tấm thép kĩ thuật điện dày 0,5mm phủ cách điện mỏng ở hai mặt rồi ép chặt lại để giảm tổn hao do dòng điện xoáy gây lên.
– Trong máy điện nhỏ, lõi thép phần ứng được ép trực tiếp vào trục.
– Trong máy điện lớn, giữa trục và lõi sắt có đặt giá rôto.
- Dây quấn phần ứng:
Hình 1-3. Sơ đồ cách quấn dây
Là phần sinh ra sức điện động và có dòng điện chạy qua.
– Dây quấn phần ứng thường làm bằng đồng có bọc cách điện.
Trong máy điện công suất nhỏ, dây quấn phần ứng dùng dây tiết diện tròn. Trong máy điện công suất vừa và lớn, dây quấn phần ứng dùng dây tiết diện hình chữ nhật.
- Cổ góp:
Hình 1- 4. Cấu tạo cổ góp
– Cổ góp dùng để đổi chiều dòng điện xoay chiều thành một chiều.
– Cổ góp có nhiều phiến đồng có đuôi nhọn, cách điện với nhau bằng lớp mica dày 0,4—1,2mm và hợp thành một trụ tròn. Hai đầu trụ tròn dùng hai vành ốp hình chữ V ép lại. Giữa vành góp có cao hơn để làm các đầu dây của các phần tử dây quấn vào các phiến góp được dễ dàng.
- Các bộ phận khác:
– Cánh quạt: quạt gió làm mát động cơ.
– Trục động cơ: trên đó đặt lõi sắt phần ứng, cổ góp, cánh quạt và ổ bi.
1.2 Phân loại động cơ điện một chiều
Có 4 loại động cơ điện một chiều thường dùng sau:
– Động cơ điện kích từ độc lập
Khi nguồn một chiều có công suất không đủ lớn, mạch điện phần ứng và mạch kích từ mắc vào hai nguồn 1 chiều độc lập nhau nên
I = Iư
– Động cơ điện kích từ song song
Khi nguồn một chiều có công suất vô cùng lớn và điện áp không đổi, mạch kích từ được mắc song song với mạch phần ứng nên
I = Iư + It
– Động cơ điện kích từ nối tiếp
Hình 1.7: Sơ đò nối dây của động cơ kích từ nối tiếp
Cuộn kích từ mắc nối tiếp với cuộn dây phần ứng, cuộn kích từ có tiết diện lớn, điện trở nhỏ, số vòng dây ít chế tạo dễ dàng nên ta có
I = Iư =It
- Động cơ điện kích từ hỗn hợp
Động cơ kích từ hỗn hợp gồm 2 dây quấn kích từ: dây quấn kích từ song song và dây quấn kích từ nối tiếp trong đó dây quấn kích từ song song là chủ yếu.
I = Iư + It
1.3 Các thông số ảnh hưởng:
Phương trình đặc tính cơ điện : ω = – Iư
Phương trình đặc tính cơ : ω = – M
Trong đó: + Uư : điện áp phần ứng ( V )
+ E: sức điện động phần ứng ( V )
+ Rư : điện trở của mạch phần ứng (W)
+ Rf : điện trở phụ của mạch phần ứng (W)
+ Iư : dòng điện mạch phần ứng. (A)
+ F: từ thông qua một cực từ (Wb)
+ w: tốc độ góc của rôto, ( rad/s)
+ k = hệ số cấu tạo của động cơ
+ M: mô men điện của động cơ
Từ hai phương trình đặc tính trên ta có các thông số ảnh hưởng :
+ Anh hưởng của điện trở phần ứng: để thay đổi điện trở phần ứng ta nối thêm điện trở phụ Rf vào mạch phần ứng. Rf càng lớn thì tốc độ của động cơ càng giảm, đồng thời dòng điện ngắn mạch và mômen ngắn mạch cũng giảm.
+ Anh hưởng của điện áp phần ứng: khi giảm điện áp thì mômen ngắn mạch giảm, dòng điện ngắn mạch giảm và tốc độ của động cơ cũng giảm ứng với một phụ tải nhất định.
+Anh hưởng của từ thông: thay đổi từ thông bằng cách thay đổi dòng điện Ikt động cơ. Khi giảm từ thông thì vận tốc động cơ tăng.
1.4 Nguyên lý hoạt động động cơ điện một chiều:
Khi nguồn điện một chiều có công suất không đủ lớn thì mạch điện phần ứng và mạch kích từ mắc vào hai nguồn một chiều độc lập với nhau, lúc này động cơ được gọi là động cơ kích từ độc lập.
Hình 1.8 Sơ đồ nguyên lý động cơ điện một chiều kích từ độc lập
Để tiến hành mở máy, đặt mạch kích từ vào nguồn Ukt , dây cuốn kích từ sinh ra từ thông Fmax tức là phải giảm điện trở của mạch kích từ Rkt đến nhỏ nhất có thể. Cũng cần đảm bảo không xảy ra đứt mạch kích thích vì khi đó Φ = 0, M = 0, động cơ sẽ không quay được, do đó Eư= 0 và theo biểu thức U=Eư = Rư.Iư thì dòng điện sẽ rất lớn làm cháy động cơ. Nếu mômen động cơ điện sinh ra lớn hơn mômen cản rôto bắt đầu quay và suất điện động Eư sẽ tăng lên tỉ lệ với tốc độ quay n. Do sự suất hiện và tăng lên của Eư , dòng điện Iư sẽ giảm theo, M giảm khiến n tăng chậm hơn.
Động cơ điện một chiều có hai nguồn năng lượng:
- Nguồn kích từ cấp vào cuộn kích từ để sinh ra từ thông kích từ.
- Nguồn phần ứng được dưa vào hai chổi than để đưa vào hai cổ góp của phần ứng.
Khi cho điện áp một chiều vào hai chổi than trong dây quấn phần ứng có điện. Các thanh dẫn cho dòng điện nằm trong từ trường sẽ chiụ lực tác dụng làm rôto quay. Chiều lực từ xác định theo qui tắc bàn tay trái.
Khi phần ứng quay được nủa vòng, vi trí các thanh dẫn đổi chỗ cho nhau. Do đó có phiếu góp chiều dòng điện giữ nguyên làm cho lực từ tác động không thay đổi.
Khi quay, các thanh dẫn cắt từ trường sẽ cảm ứng với suất điện động Eư chiều của nó được xác diịnh theo qui tắc bàn tay phảI, ở động cơ chiều SĐĐ Eư ngược chiều dòng điện Iư nên Eư gọi là sức phản điện động.
1.5 Phương pháp điều chỉnh tốc độ động cơ điện một chiều:
Từ phương trình đặc tính cơ của động cơ điện một chiều
ω = – .M
ta thấy việc điều chỉnh tốc độ động cơ điện một chiều có thể thực hiện bằng cách thay đổi các đại lượng Rư ,U, F.
Điều khiển tốc độ là một trong những nội dung chính của truyền động điện tự động nhằm đáp ứng yêu cầu công nghệ của các máy sản xuất. Để đánh giá chất lượng của một hệ thống truyền động điện thường căn cứ vào một số chỉ tiêu sau:
Sai số tĩnh tốc độ là đại lượng đặc trưng cho độ chính xác duy trì tốc độ đặt và được đánh giá thông qua:
Mong muốn: sai số wđ = w
s% càng nhỏ càng tốt.
– Tính liên tục( độ trơn dải điều chỉnh)
g = wi + 1/wi
wi + 1 » wi: hệ thống điều khiển liên tục
wi + 1 ¹ wi : hệ thống điều khiển nhảy cấp
Mong muốn g ® 1: hệ truyền động có thể làm việc ổn định ở mọi giá trong suốt dải điều chỉnh.
Dải điều khiển tốc độ ( D) là tỉ số giữa giá trị lớn nhất và giá trị nhỏ nhất của tốc độ làm việc ứng với mômen tải đã cho:
Mong muốn D càng lớn càng tốt
Ngoài ra còn các chỉ tiêu khác như: chỉ tiêu kinh tế, kích thước.
1.5.1 Điều chỉnh tốc độ bằng cách thay đổi điện trở phần ứng:
Trong phương pháp này người ta giữ U = Uđm; F = Fđm và nối thêm điện trở phụ vào mạch phần ứng để tăng điện trở phần ứng.
Độ cứng của đường đặc tính cơ:
Ta thấy khi điện trở càng lớn thì b càng nhỏ nghĩa là đặc tính cơ càng dốc và do đó càng mềm hơn.
Hình1.9 đường đặc tính cơ khi thay đổi Rf
ứng với Rf = 0 ta có độ cứng tự nhiên bTN có giá trị lớn nhất nên đặc tính cơ tự nhiên có độ cứng lớn hơn tất cả các đường đặc tính cơ có điện trở phụ.
Như vậy, khi ta thay đổi Rf ta được một họ đặc tính cơ thấp hơn đặc tính cơ tự nhiên.
- Đặc điểm của phương pháp
- Điện trở mạch phần ứng càng tăng thì độ dốc đặc tính càng lớn, đặc tính cơ càng mềm, độ ổn định tốc độ càng kém và sai số tốc độ càng lớn.
- Phương pháp này chỉ cho phép điều chỉnh tốc độ trong vùng dưới tốc độ định mức ( chỉ cho phép thay đổi tốc độ về phía giảm).
- Chỉ áp dụng cho động cơ điện có công suất nhỏ, vì tổn hao năng lượng trên điện trở phụ làm giảm hiệu suất của động cơ và trên thực tế thường dùng ở động cơ điện trong cần trục.
- Đánh giá các chỉ tiêu
- Tính liên tục: phương pháp này không thể điều khiển liên tục được mà phải điều khiển nhảy cấp.
- Dải điều chỉnh phụ thuộc vào chỉ số mômen tải. Tải càng nhỏ thì dải điều chỉnh D = wmax / wmin càng nhỏ. Phương pháp này có thể điều chỉnh trong dải D = 3 : 1
- Giá thành đầu tư ban đầu rẻ nhưng không kinh tế do tổn hao trên điện trở phụ lớn.
- Chất lượng không cao dù điều khiển rất đơn giản.
1.5.2 Điều chỉnh tốc độ bằng cách thay đổi từ thông :
Giả thiết U= Uđm; Rư = const . Muốn thay đổi từ thông động cơ ta thay đổi dòng điện kích từ.
Thay đổi dòng điện trong mạch kích từ bằng cách nối nối tiếp biến trở vào mạch kích từ hay thay đổi điện áp cấp cho mạch kích từ.
Bình thường động cơ làm việc ở chế độ định mức với kích thích tối đa (F = Fmax) mà phương pháp này chỉ cho phép tăng điện trở vào mạch kích từ nên chỉ có thể điều chỉnh theo hướng giảm từ thông F tức là điều chỉnh tốc độ trong vùng trên tốc độ định mức.
® Khi giảm F thì tốc độ không tải lý tưởng tăng, còn độ
cứng đặc tính cơ giảm, ta
thu được họ đặc tính cơ nằm trên đặc tính cơ tự nhiên.
Khi tăng tốc độ động cơ bằng cách giảm từ thông thì dòng điện tăng và tăng vượt quá mức giá trị cho phép nếu mômen không đổi. Vì vậy muốn giữ cho dòng
Hình1.10 đặc tính cơ khi thay đổi từ thông
điện không vượt quá giá trị cho phép đồng thời với việc giảm từ thông thì ta phải giảm Mt theo cùng tỉ lệ.
- Đặc điểm của phương pháp
- Phương pháp này có thể thay đổi tốc độ về phía tăng.
- Phương pháp này chỉ điều khiển ở vùng tải không quá lớn so với định mức.
- Việc thay đổi từ thông không làm thay đổi dòng điện ngắn mạch.
- Việc điều chỉnh tốc độ bằng cách thay đổi từ thông là phương pháp điều khiển với công suất không đổi.
- Đánh giá các chỉ tiêu điều khiển
- Sai số tốc độ lớn: đặc tính điều khiển nằm trên và dốc hơn đặc tính tự nhiên.
- Dải điều khiển phụ thuộc vào phần cơ của máy. Có thể điều khiển trơn trong dải điều chỉnh D = 3 :1
- Tính liên tục: vì công suất của cuộn dây kích từ bé, dòng điện kích từ nhỏ nên ta có thể điều khiển liên tục với F » 1
- Phương pháp này được áp dụng tương đối phổ biến, có thể thay đổi liên tục và kinh tế ( vì việc điều chỉnh tốc độ thực hiện ở mạch kích từ với dòng kích từ = (1 – 10)%Iđm của phần ứng nên tổn hao điều chỉnh thấp).
® Đây là phương pháp gần như là duy nhất đối với động cơ điện một chiều khi cần điều chỉnh tốc độ lớn hơn tốc độ điều khiển.
1.5.3 Điều chỉnh tốc độ bằng cách thay đổi điện áp phần ứng:
Để điều chỉnh điện áp phần ứng động cơ một chiều cần có thiết bị nguồn (máy phát điện một chiều kích từ độc lập, các bộ chỉnh lưu điều khiển.)
ở phương pháp này: U = var;
Fđm = const; Rf = 0
Khi thay đổi phần ứng ( thay đổi theo chiều giảm điện áp), vì từ thông của động cơ được giữ không đổi nên độ cứng đặc tính cơ cũng không đổi, còn tốc độ không tải lí tưởng wo = U /k.F thay đổi tùy thuộc vào giá trị điện áp phần ứng.
Do đó ta thu được họ đặc tính mới song song và thấp hơn đặc tính cơ tự nhiên tức là vùng điều khiển tốc độ nằm dưới tốc độ định mức.
Hình1.11 đặc tính cơ khi thay đổi Uư
- Đặc điểm của phương pháp
- Điện áp phần ứng càng giảm, tốc độ động cơ càng thấp.
- Điều chỉnh trơn trong toàn bộ dải điều chỉnh.
- Độ cứng đặc tính cơ cao và được giữ không đổi trong toàn dải điều chỉnh.
- Chỉ thay đổi tốc độ về phía giảm
- Rất dễ tự động hóa khi dùng chỉnh lưu có điều khiển.
- Phương pháp này điều khiển với mômen không đổi vì F và Iư đều không đổi.
- Đánh giá chi tiêu điều khiển
- Sai số tốc độ lớn ( sai số tốc độ bằng sai số tốc độ của đặc tính cơ tự nhiên)
- Tính liên tục: điện áp của động cơ được điều khiển bằng bộ biến đổi. Các bộ biến đổi hiện nay đều có công suất bé nên có thể điều chỉnh liên tục.
- Dải điều chỉnh có thể đạt được D = 10:1
® Đây là phương pháp duy nhất có thể điều chỉnh liên tục tốc độ động cơ trong vùng tốc độ thấp hơn tốc độ định mức đối với động cơ một chiều.
Þ Qua việc xét ba phương pháp điều chỉnh tốc độ động cơ ta thấy phương pháp điều chỉnh điện áp phần ứng là triệt để và có nhiều ưu điểm hơn cả nên ta chọn phương pháp này để điều khiển tốc độ động cơ điện một chiều.
1.6 Đảo chiều động cơ:
Hình 1.12 sơ đồ nguyên lý đảo chiều phần ứng
Hình 1.13 sơ đồ nguyên lý đảo chiều phần kích từ
- Chiều lực từ tác dụng vào dòng điện được xác định theo qui tắc bàn tay trái. Khi đảo chiều từ thông hay đảo chiều dòng điện thì lực tư có chiều ngược lại, vậy muốn đảo chiều động cơ điện 1 chiều ta thực hiện 1 trong 2 cách như hình vẽ trên.Và đường đặc tính cơ khi quay thuận và khi quay ngược là đối xứng nhau qua gốc tọa độ.
- Nguyên lý:
Khi ta thực hiện 1 trong 2 cách đảo chiều phần ứng động cơ hoặc phần kích từ thì nguyên tăc chung là:
Ta muốn quay thuận thì chỉ việc ấn 2 tiếp điểm thuongf đóng T lại khi đó 2 tiếp điểm thường mở là N sẽ mở ra và dòng điện sẽ đI qua 2 tiếp điểm T è Quay thuận.
Ta muốn quay ngược thì chỉ việc nhả 2 tiếp điểm T ra và ấn 2 tiếp điểm thường mở lại khi đó dòng điện sẽ chạy qua 2 tiếp điểm N è Quay ngược.
CHƯƠNG 2
PHÂN TÍCH VÀ LỰA CHỌN PHƯƠNG ÁN
Như đã tìm hiểu về động cơ điện một chiều ở chương 1, ta thấy, nguồn cấp cho động cơ điện một chiều có thể có thể dùng bộ biến đổi một chiều. Vì bộ bién đổi một chiều có thể thiết kế dễ dàng nhờ các mạch chỉnh lưu sử dụng van bán dẫn. Hơn nữa các mạch chỉnh lưu sử dụng van điều khiển còn có thể điều khiển dễ dàng ,độ tin cậy cao. Do đó, ta đi tìm hiểu và thiết kế nguồn cấp một chiều, qua mạch chỉnh lưu điện áp xoay chiều lấy từ lưới điện cho động cơ điện một chiều.
Dưới đây là một số mạch chỉnh lưu cơ bản hay được sử dụng:
- Chỉnh lưu cầu 1 pha.
- Chỉnh lưu hình tia 3 pha.
- Chỉnh lưu cầu 3 pha điều khiển đối xứng
- Chỉnh lưu tia 2 pha.
2.1 Chỉnh lưu hình cầu 1 pha
2.1.1. Sơ đồ động lực
Hình 2.3 Chỉnh lưu cầu 1 pha điều khiển đối xứng
Hình 2.4 Giản đồ điện áp chỉnh lưu cầu 1 pha
2.1.2. Nguyên lý hoạt động:
Trong 1/2 chu kỳđiện áp của thyristo T1 dương (khi đó catot T2 âm) nếu cấp xung điều khiển đồng thuận với điều khiển phảI cả 2 xung cùng một lúc thì T1 , T2 sẽ dẫn. Đến 1/2 sau thì điện áp đổi dấu anot T3 dương, catot T4 âm, nếu có xung điều khiển đồng thời cho cả 2 van thì các van được mở thông.
- Góc mở van α, góc dẫn các van λ
0 – α : T1, T2 dẫn
α – α + λ : T3, T4 dẫn ,khóa T1 ,T2 lại.
2.1.3 Công thức:
Điện áp ra:
Udα = U2cosα = 0,9U2cosα
Idα =
Iv =
Sba = 1,23Pd
Ungmax = U2
I2 = 1,11Id
2.1.4 Nhận xét:
Chỉnh lưu cầu một pha sử dụng rộng rãi trong thực tế,nhất là với cấp điện áp tải lớn hơn 10V. Dùng tải lớn tới 100A. Ưu điểm của nó là không nhất thiết phảI có biến áp nguồn. Tuy nhiên do số lượng van gấp 2 hình tia nên sụt áp trong mạch cũng gấp 2.Do đó nó không phù hợp với tải có dạng dòng lớn nhưng áp nhỏ.
2.2 Chỉnh lưu hình tia 3 pha:
2.2.1 Sơ đồ nguyên lý:
Hình 2.5 Chỉnh lưu hình tia 3 pha
Hình 2.6 giản đồ điện áp và dòng điện chỉnh lưu tia 3 pha
2.2.2 Nguyên lý hoạt động:
Nguyên tắc mở thông và điều khiển các van: khi anod của van nào dương hơn thì van đó mới được kích mở, thời điểm hai điện áp của hai pha giao nhau được coi là góc thông tự nhiên của các van bán dẫn. Còn các Tiristo chỉ được mở thông với góc mở nhỏ nhất tại thời điểm góc mở tự nhiên( như vậy trong chỉnh lưu tia 3 pha, góc mở nhỏ nhất a = 0 sẽ dịch pha so với điện áp pha một góc là 30o).
Chỉnh lưu tia 3 pha được phân biệt bởi hai vùng mở khác nhau:
Khi a < p/6 thì việc mở van bán dẫn không phụ thuộc vào tải dạng gì. Trong vùng mở điện áp dương các Tiristo dẫn liên tục: có sự chuyển mạch từ van này sang van kia, không có sự hoàn trả năng lượng về lưới. Các đường cong Ud, Id liên tục.
Khi a > p/6 thì Tiristo sẽ được mở trong khoảng nào tùy thuộc vào tích chất của tải: nếu tải thuần trở thì đường cong điện áp và dòng điện là gián đoạn còn nếu tải điện cảm (nhất là điện cảm lớn) thì đường cong dòng điện và điện áp là các đường cong liên tục nhờ năng lượng dự trữ trong cuộn dây đủ lớn để duy trì dòng điện khi điện áp đổi dấu. Với tải điện cảm, Tiristo được dẫn có phần âm điện áp nên có sự trả năng lượng về lưới.
2.2.3 Công thức liên quan:
– Điện áp ra:
Udα = U2cosα = 1,17U2cosα
Với: α góc điều khiển
U2 tham số cố định
– Dòng điện trên van:
Iv =
– Công suất biến áp
Sba = 1,35Pd
– Điện áp ngược lơn nhất trên van
Ungmax = U2
– Trị số hiệu dụng dòng điện cuộn thứ cấp biến áp nguồn:
I2 = 0,58Id
– Id trị số trung bình dòng điện ra tải
2.2.4 Nhận xét:
Việc điều khiển các van tương đối đơn giản.
Chỉnh lưu tia 3 pha cần có biến áp nguồn để đưa điểm trung tính ra tải. Công suất máy biến áp này nhỏ hơn công suất 1 chiều 1,35 lần, tuy nhiên sụt áp trên van nhỏ nên thích hợp với điện áp thấp. Vì sử dụng nguồn 3 pha nên cho phép nâng công suất tảI lên gấp nhiều lần,mặt khác độ đập mạch của điện áp chỉnh lưu giảm đắng kể nên kích thước bộ lọc nhỏ đi nhiều.
2.3 Chỉnh lưu cầu 3 pha điều khiển đối xứng:
2.3.1 Sơ đồ nguyên lý:
Hình 2.11 Sơ đồ chỉnh lưu cầu 3 pha điều khiển đối xứng
Hình 2.12: giản đồ điện áp và dòng điện dẫn qua van
2.3.2 Nguyên lý hoạt động:
Theo hoạt động của chỉnh lưu cầu 3 pha điều khiển đối xứng, dòng điện chạy qua tải là dòng điện chạy từ pha này về pha kia, do đó tại mỗi thời điểm cần mở Tiristo chúng ta cần cấp 2 xung điều khiển đồng thời (1 xung ở nhóm anod, 1 xung ở nhóm catod). Hai xung điều khiển có: một xung chính quyết định góc mở, 1 xung đêm để có dòng điện.
Các van T1, T3, T5 thay nhau dẫn cho điện áp ở điểm katot chung Ukc
Các van T2, T4, T6 thay nhau dẫn ở điểm anot chung Uac.
2.3.3. Công thức liên quan:
– Điện áp ra:
Udα = Udocosα = U2cosα
– Dòng trung bình trên van
Itbv =
– Điện áp ngược lớn nhất:
Ungmax = U2
– Công suất máy biến áp:
Sba = 1,05Pd
– Trị số hiệu dụng dòng điện cuộn thứ cấp biến áp nguồn:
I2 = 0,816Id
2.3.4. Nhận xét:
Chỉnh lưu cầu ba pha là loại được sử dụng rộng rãi nhất trong thực tế, vì nó có nhiều ưu điểm . Nó cho phép có thể đấu thẳng vào lưới điện 3 pha, độ đập mạch nhỏ 5%. Nếu có sử dụng máy biến áp thì gây méo lưới điện ít hơn các loại khác. Đồng thời công suất mạch chỉnh lưu này lớn len tới vài trăm KW.
Nhược điểm là sụt áp trên van gấp đôI trren van của sơ đồ hình tia.
2.4.Chỉnh lưu tia 2 pha:
2.4.1. Sơ đồ nguyên lý:
Hình 2.13 chỉnh lưu tia 2 pha
Hình 2.14 giản đồ điên áp
2.4.2 Nguyên lý hoạt động:
Khi T1 được mở sẽ có dòng điện chạy qua tải và duy trì T1 ở trạng thái dẫn tới lúc dòng điện bằng không, lúc đó điện áp đổi dấu và kích mở T2 chuyển sang dẫn.
Khi tải có điện cảm thì dòng điện gián đoạn hau liên tục là do nằng lượng điện từ tích lũy trong cuộn dây lớn hay bé
Wdt=Li2/2 phụ thuộc vào L,I doquyết định ( nếu càng lớn thì i2 càng lớn, vùng gián đoạn nhỏ đi).
Khi tải điện cảm lớn tới mức dòng điện của van đang dẫn bằng 0 đã mở van kế tiếp thì đường cong điện áp, dòng điện là liên tục.
2.4.3 Công thức liên quan:
– Điện áp ra:
Udα = U2cosα = 0,9U2cosα
Với α : góc điều khiển
U2 = const
– Dòng điện trên van:
Iv =
– Công suất biến áp:
Sba = 1,48Pd
Pd công suất tải
Pd =Ud0.Id
– Điện áp ngược:
Ungmax = 2,83U2
– Trị số hiệu dụng dòng điện cuộn thứ cấp biến áp nguồn:
I2 = 0,58Id
2.4.4 Nhận xét:
- Việc điều khiển các van tương đối đơn giản.
- Điện áp ra tải thấp do độ sụt áp trong mạch van thấp hơn.
- Việc chế tạo biến áp phức tạp, hiệu suất sử dụng biến áp xấu hơn.
- Buộc phải có biến áp nguồn để tạo điểm giữa cho mạch hoạt động.
2.5 Kết luận:
Qua tìm hiểu một số sơ đồ mạch chỉnh lưu cơ bản, và yêu cầu của đồ án vơí số liệu:
Pđm = 2,2 KW
n = 1450 v/p
iưđm = 14,4 A
ikt = 0,72 A
Rư = 1,6
η = 80%
Ud = Pđm/ iưđm. η= 191 (V)
Ta thấy Pđm nhỏ hơn 15 KW nên dùng sơ đồ chỉnh lưu 1 pha
Udkhá lớn nên dùng sơ đồ cầu.
Vậy để phù hợp yêu cầu đồ án ta chọn sơ đồ cầu 1 pha điều khiển đối xứng.
CHƯƠNG 3
TÍNH TOÁN MẠCH LỰC
3.1. Sơ đồ cấu trúc
Hình 3.1- Sơ đồ cấu trúc
Trong đó:
+BA: có tác dụng chuyển điện áp và số pha chuẩn từ lưới điện sang giá trị điện áp và số pha thích hợp với mạch lực và tải. Nếu điện áp, số pha đã cho phù hợp thì không cần ding BA.
+CL: có tác dụng biến đổi điện áp xoay chiều sang 1 chiều.
+MĐK: có tác dụng vào các thời điểm cần thiết nhằm khống chế năng lượng đưa vào.
3.2.Sơ đồ mạch lực
Hình 3.2 sơ đồ mạch lực
3.3. Tính chọn van
Các van trong mạch CL công suất làm việc nhỏ với dòng điện không lớn vì vậy phải chọn van sao cho phù hợp mới đảm bảo được mạch hoạt động tốt.
– Tính trọn van dựa vào các yếu tố cơ bản như điện áp ngược cực đại (Ung max) của van. Dòng điện định mức của van.Từ sơ đồ cầu 1 pha và các thông số động cơ ta có:
Ud= (V)
U2= (V)
Điện áp ngược cực đại của van là :
Ungmax=Knv.U2= 1,41.U2= 299 (V)
Uv= Klu.Ungmax= 1,8.299= 538,2 (V)
Dòng điện định mức của van là :
Itbv= (A)
Dòng điện trên van là :
Iv = Klv . Itbv = 2,2.7,2 = 15,84 (A)
Khi làm việc, dòng điện qua động cơ, các van thường xuyên làm việc ở chế độ quá tải nên ta chọn hệ số dưh trữ…ở đây ta sử dụng chế độ làm mát tự nhiên, dòng điện chỉ cho phép bằng 25% dòng định mức.
Với thông số trên ta tra bảng được :T46N600COC
+) Điện áp ngược cực đại Ungmax = 600 V
+) Dòng làm việc cực đại Idmmax = 46 A
+) Dòng điện đỉnh cực đại Ipik max = 1000 A
+) Dòng điện xung điều khiển Ig = 150 mA
+) Điện áp xung điều khiển U = 2,5 V
+) Dòng điện rò Irmax = 10 mA
+) Dòng điện duy trì Ikmax = 1 A
+) Sụt áp trên Thyristo ở trạng tháI bán dẫn ∆Umax = 1.9 V
+) Tốc độ biến thiên điện áp du/dt = 400 V/ μs
+) Nhiệt độ làm việc cực đại T=125C
3.4. Tính toán chọn máy biến áp
Các đại lượng cần tính cho mạch chỉnh lưu cầu 1 pha
Ud0 = Ud +∆Uba +∆Uv +∆Uck
Trong đó :
Ud0 : Điện áp chỉnh lưu không tải
Ud : Điện áp chỉnh lưu .
∆Uba : Sụt áp trên biến áp .
∆Uv : Sụt áp trên van .
∆Uck : Sụt áp trên cuộn kháng
=>Udo= 191+0,05.191.2+1,9 = 212 (V)
– Công suất tối đa của tải :
Pd max = U do . I dm = 212.14,4 = 3,053 (Kw)
– Công suất của biên áp nguồn
Sba = Kp . P d max = 1,23 . 3,053 = 3,755 (KVA)
– Điên áp đính mức phía thứ cấp :
U2dm= (V)
Hệ số MBA: Kba=
-Tính toán sơ bộ mạch từ
Tiết diện trụ của lõi thép biến áp được tính từ công thức :
Trong đó:
: Hệ số phụ thuộc làm mát ()
m : Số trụ MBA ( m= 2 )
=> ( cm2 )
-Đường kính trụ
d =6,84 ( cm )
Ta chuẩn hóa đường kính trụ theo tiêu chuẩn d= 7 ( cm )
Chọn loại thép E330 các lá thép có độ dày 0,35 mm
-Tính toán dây quấn MBA
+Tính toán điện áp của các cuộn dây
Điện áp cuộn thứ cấp
U2= ( V )
+Tính dòng điện trong các cuộn dây
I1= ( A )
I2= ( A )
-Tính vòng dây của mỗi cuộn
Ta có :
Số Vôn/vòng = 4.44*B*QFe*f*10-4
B = 1.5 (T); QFe=36,77(cm2); f = 50(Hz)
Thay số :
Số vòng dây của cuộn một :
Số Vôn/vòng = 4,44.1.5.36,77.50.10-4 =1,2244
W1 = ( Số Vôn/vòng)*U1 =1,2244 .220 = 269(vòng)
W2 =(Số Vôn/ vòng)*U2 =1,2244 .236 = 289 (vòng)
-Tính toán tiết diện dây quấn
SCu =
Trong đó :
I : Cường đọ òng điện trong các cuộn dây
J : Mật độ dòng điện trong các cuôn dây
Chọn J = 2.75 ( A/mm2 )
Thay số :
SCu2 = Þ D1 = == 2,8 ( mm)
Chuẩn kich thước : SCu1 = a1.b1 = 1,81.3,53 = 6,18 ( mm2 )
+Tính lại mật độ dòng
J1= ( A/mm )
+ Tính dây quấn thứ cấp
S2= ( mm2 )
Ta chuẩn hóa : S2 = 5,7 ( mm2 )
+ Tính lại mật độ dòng
J2= ( A/mm )
-Tính kích thước mạch từ
Do chọn lá thép dày 0,35mm
Diện tích của sổ cần thiết :
QCS = QCS1 +QCS2
Với :
QCS1 = klđ.W1.SCu1 ; QCS1 = klđ.W2.SCu2
Trong đó :
QCS1, QCS2 : Phần do cuộn sơ cấp và thứ cấp chiếm chỗ
W1 ,W2 : Số vòng dây sơ cấp và thứ cấp
klđ : Hệ số lấp đầy , chọn klđ = 2.5
=>Qcs=2,5.269.6,2 +2,5 .289.5,8 = 8360 ( mm2 ) = 83,6 ( cm2 )
-Tính kích thước cửa sổ
Khi đã có diện tích cửa sổ QCS cần chọn các kích thước cơ bản là chiều cao h và chiều rộng ccủa cửa sổ mạch từ .Tuỳ theo thiết kế mà chọn giá trị cơ bản c và h . Thông thưòng chọn theo hệ số phụ như sau :
m = = 2.5 ; n = = 0.5 ; l = = 1 ¸1.5
Tính toán ta được : a = 7,6 (cm) ; b = 11(cm) ; c = 3,8(cm) ; h = 19(cm)
Chiều rộng toàn bộ mạch từ là : C = 2.c +3.a = 2.3,8 + 3.7,6 = 30,4 (cm)
Chiều cao toàn bộ mạch từ la : H = h + 2.a = 19 + 2.7,6 = 34,2 (cm)
-Tính số vòng trên mỗi lớp
Dây quấn được bố trí theo dọc trụ , mỗi quận dây quấn thành nhiều lớp . Mỗi lớp được quấn liên tục, các vòng dây sát nhau, Các lớp dây cách nhau bằng một bìa cách điện.
– Số vòng dây trên mỗi lớp:
+ Kết cấu dây quấn sơ cấp :
Khi dây quấn tiết chữ nhật :
W1L= =
Trong đó:
h : chiều cao cửa sổ.
bn : bề rộng dây quấn kể cả cách điện.
hg : khoảng cách cách điện với gông: hg = 5(mm)
ke : hệ số ép chặt ke = 0.95
Số lớp dây trong cửa sổ được tính bằng tỷ số số vòng dây W của cuộn W1 hoặc W2 cần tính trên số vòng dây trên một lớp.
W1d = =(lớp) 6 (lớp)
Chiều cao thực tế của cuộn sơ cấp :
– Tính chiều dài của các cuộn dây đồng
Chọn ống quấn dây làm bằng vật liệu cách điện có bề dầy : S01=0,1 (cm)
Khoảng cách từ trụ tới cuộn sơ cấp a01= 1,0(cm)
Đường kính trong của ống cách điện
Dt = dfe + 2 . a01 – 2 .S 01 = 2,8 + 2.1 – 2.0,1 = 4,6cm)
Đường kính trong của cuộn sơ cấp
Dt1 = Dt + 2 . S01 = 4,6 + 2 . 0,1 = 4,8(cm)
Chọn bề dày cách điện giữa các lớp dây ở cuộn sơ cấp
cd11 = 0,1(mm)
Bề dày cuộn sơ cấp
Bd1 = (a1 + cd11) . n11 = (1,81+0,1).6,1 = 11,46(mm) = 1,15(cm)
Đường kính ngoài của cuộn sơ cấp
Dn1 = Dt1 + 2 . Bd1 = 1,15.2 + 4,8 = 7,1(cm)
Đường kính trung bình của cuộn sơ cấp :
Dtb1 = ( Dt1 + Dn1 ) / 2 = (7,1 + 4,8 )/2 = 5,95 (cm)
Chiều dài dây cuộn sơ cấp :
l1 = W1 . p . Dtb = 2,69. p. 5,95 = 5028,27 (cm) = 50,283 (m)
Chọn bề dày cách điện giữa cuộn sơ cấp và thứ cấp :
cd01 = 1(cm)
+ Kết cấu dây quấn thứ cấp
Chọn sơ bộ chiều cao cuộn thứ cấp
h1 = h2 = 19 (cm)
Tính sơ bộ số vòng dây trên 1 lớp:
(vßng)
Tính sơ bộ số lớp dây quấn trên cuộn thứ cấp :
(líp)
Chiều cao thực tế của cuộn thứ cấp :
(cm)
Khoảng cách từ trụ tới cuộn thứ cấp là: a12= 1,0 (cm)
Đường kính trong của cuộn thứ cấp :
Dt2 = Dn1 + 2 . a12 = 7,1 + 2 = 9,1 (cm)
Þ rt2 = Dt2/2 =9,1/2 = 4,6 (cm)
Chọn bề dầy cách điện giữa các lớp dây ở cuộn thứ cấp cd22 = 0,1(mm)
Bề dầy cuộn thứ cấp :
Bd2 = (a2 + cd22) .n12 = (0,156 + 0,1) . 6 = 1,536 (cm)
Đường kính ngoài của cuộn thứ cấp:
Dn2 = Dt2 + 2 .Bd2 = 9,1+ 2 . 1,536 = 12,172(cm)
Đường kính trung bình của cuộn thứ cấp :
Dtb2 = ( Dt2 + Dn2 ) / 2 = (9,1 + 12,172) / 2 = 10,636(cm)
Chiều dài dây quấn thứ cấp :
l2 = p . w2 . Dtb2 = p. 298.4,6 = 4306,5(cm)
Þl2 » 43,1 (m)
Đường kính trung bình các cuộn dây:
D12 = ( Dt1 + Dn2 ) / 2 = (4,8 + 12,172 )/2 = 8,5(cm)
Þ r12 = D12/2 =4,25 (cm)
-Tính sụt áp trên MBA
+Điện áp rơi trên trở
∆Ur = [R2 + ] Id
Trong đó:
R1, R2: điện trở thuận của các cuộn dây
R1 = rCu = 0.0000172* =0,081(W)
R2 = rCu = 0.000072* =0.074(W)
Với rCu = 0,0000172 Wmm.
Id : dòng tải một chiều.
∆Ur = [R2 + ] Id
= 2,41 (V)
+Điện áp ra trên cuộn kháng
∆Ux =
Trong đó:
mf: số pha biến áp.
W2 : số vòng dây thứ cấp biến áp.
Rbk: bán kính dây thứ cấp.
l : chiều cao lá thép.
h : Chiều cao cửa sổ lõi thép
cd : bề dày cách điện của các cuộn dây với nhau .
Xn = 8.2.2892..314.10-7
= 50,73 ( )
=>∆Ux = 50,73.14,4 = 232,5 (V)
+Điện kháng MBA quy đổi về thứ cấp:
+Điện trở ngắn mạch
Rnm = R2 + . R1
= 0,074 + ư
= 0,195 ( )
+Tổng trở ngắn mạch
Z nm = = = 50,73 ( )
+Sụt áp trên MBA:
Uba= == 232,5 ( )
-Tính điện áp phần trăm ngắn mạch
+ Điện áp ngắn mạch
1,13 (V)
+ Điện áp ngắn mạch phản kháng
= 344 (V)
+ Điện áp ngắn mạch
Unm== 344 (V)
+ Dòng ngắn mạch
=4,65 (A)
3.5. Tính toán bộ lọc
Vì hệ số đập mạch chỉnh lưu cầu 1 pha là Kdmv= 0,67 ; Kdms=0,5 nên hệ số san bằng:
1,34
Ta có điện trở tương đương
= 13,26 ( )
= 0,12 (H)
Tính kích thước lõi thép:
– Kích thước cơ sở:
a = 2,6
Chọn a = 3 (cm)
b = 1,2a = 3,6 (cm)
c = 0,9a = 2,7 (cm)
h= 3a = 9 (cm)
– Tiết diện lõi thép:
Sth = ab = 3.3,6=10,8 (cm2)
– Diện tích của sổ :
= h.c = 9.2,7=24,3 (cm2)
– Độ dài trung bình đường sức:
lth = 2.(a+b+c)= 2.(3+3,6+2,7)=18,6 (cm)
– Độ dài trung bình dây quấn:
ldq= 2(a+b) + pc = 2(3+3,6) +p.2,7= 21,7 (cm)
– Thể tích lõi thép:
Vth = 2ab (a+h+c) = 2.3.3,6.(3+9+2,7)= 317,52
*) Tính điện trở của dây quấn ở t0 = 200C đảm bảo độ sụt áp cho phép:
∆U = 7,5%Uđm =
Tmt = 400C ; ∆T = 500C
Theo tính toán:
r20 = =0,775 ( )
r20 = 0,091(W)
*) Số vòng dây của cuộn cảm
W = 414=385,7(V)
*) Tính mật độ từ trường
H = =29860,5 (A/m)
*) Tính cường độ từ cảm
b = =0,15 (T)
*) Tính hệ số từ thẩm:
Theo thực nghiệm ta có:
m = 542.
Trị số điện cảm nhận được
Ltt =
*) Tiết diện dây quấn
s = 0,072.=1,878 (mm2)
Đường kính của dây quấn
d = 1,13 = 1,13=1,55 (mm)
Chọn dây có d= 2(mm)
*) Xác định khe hở tối ưu:
lkk = 1.6.10-3. W .I = 1,6.10-3.385,7.14,4=8,9(m)
Vì trên đường đi mạch từ có hai đoạn khe hở nên miếng đệm cơ đo chiều dầy băng 1/2lkk.
lđệm = 0,5.lkk = 4,45(mm)
*) Kích thước cuộn dây
Chọn dây quấn dầy 0,5mm, độ cao sử dụng dây quấn.
hssd = h – 2∆C = 19-2.0,35=18,3 (cm)
– Số vòng dây trong 1 lớp:
W’ = =9 (vòng)
– Tính số lớp dây:
n = =43
Vậy cần quấn 43 lớp
– Độ dày của cả cuộn dây
∆cd = n(d + ∆cd)
Trong đó: ∆cd = 1(mm)
∆cd = 43.(0,2+1)=12,9 (cm)
Độ dày của quận dây ∆cd bằng một nửa kích thước cửa số c = 2,7 nên dây lọt vào trong cửa sổ.
*) Kiểm tra chênh lệch nhiệt độ:
PCu = =197,7 (W)
SCu = 2hsd (a+b+p∆cd) + 1,4. ∆cd ( p∆cd + 2a)
SCu = 2.18,3(3+3,6+p.12,9) + 1,4.12,9.( p.12,9 +6) =2565 (cm2)
Hệ số phát nhiệt:
a = 1,03. 10-3
Độ chênh lệch nhiệt độ:
∆Ttt < ∆T cho phép Þ Thoả mãn
3.6.Tính toán bảo vệ mạch lực
-Tính toán cánh tản nhiệt
Tổn thất công suất trên 1 thyristor :
P=U.Itb=1,9.7,2=13,68 (W)
Diện tích bề mặt tỏa nhiệt :
Sm=P.Km.
Trong đó:
P: tổn hao trên P
: độ chênh lệch của môi trường Tmt=40C
Nhiệt độ cho phép Thyristor : Tcp=125C
Chọn nhiệt trên cách tỏa nhiệt : Tlv=80C
->=Tlv – Tmt = 80C – 40C = 40C
Km: hệ số toản nhiệt tối ưu và bức xạ
Km= 8 [/m2.C] , Sm=43,7 (m2). Ta chọn cánh tản nhiệt có 12 cánh
Kích thước : a.b= 10.10= 100
->Tổng diện tích : S= 12.2.10.10 = 2400 (cm2)
-Tính bảo vệ dòng
Thực tế thì trong van đã có hệ thống bảo vệ nhưng theo yêu cầu của đề bài nên ta tính như sau:
Ta chọn Atomat có:
Idm= 1,1. Idm =1,1.14,4 = 18,85 (A)
Udm= 220(V)
Có 2 tiếp điểm chính có thể đóng cắt bằng tay hoặc nam châm điện
Chỉnh định dòng ngắn mạch
Inm= 2,5Id=2,5.14,4 = 36 (A)
Dòng quá tải: Iqt=1,5 Id=1,5.14,4 = 2,6 (A)
Chọn cầu dao có dòng định mức: Icd=1,1.Id=Idm=15,84 (A)
dùng dây tác dụng nhanh để bảo vệ thyristor ngắn mạch đầu ra của bộ chỉnh lưu
Nhóm 1CC: dòng định mức nhóm 1 CC
I1cc=1,1.Id= 1,1.14,4=15,84 (A)
Nhóm 2CC: I2cc=1,1.Itb=1,1.7,2 = 7,92 (A)
Nhóm 3CC: I3cc= 1,1.Id= 1,1.14,4 = 15,84 (A)
- Ta chọn cầu chì nhóm 1CC và 2CC là 16 (A) còn 3CC là 8 (A)
-Bảo vệ quá điện áp cho van
Bảo vệ quá điện áp do quá trình đóng cắt thyristor được thực hiện bằng cách mắc R-C song song với thyristor. Khi có sự chuyển mạch các điện tích tụ các lớp bán dẫn phóng ra ngoài tạo ra dòng điện ngược trong khoảng thời gian ngắn, sự biến thiên nhanh chonhs của dòng điện ngược gây ra sức điện động cảm ứng rất lớn trong các điện cảm làm cho quá điện áp giữa anốt và katot của thyristor. Khi có R_C mắc song song với thyristor tạo ra mạch vòng phóng điện tích trong quá trình chuyển mạch của Thyristor không quá áp.
-Hệ số biên áp của van
K=Ucp/b.Utt
Trong đó:
Ucp: điện áp max cho phép đặt lên van
Utt:: điện áp thực tế đặt lên thyristor
K: hệ số
b: hệ số giự trữ điện áp ( b=1)
=>K ==0,89
Tra bảng và đồ thị ta có:
Cmin=0,77
Rmin=0,8
Rmax=1,7
Xác định R_C
-Kiểm tra tốc độ tăng thuận qua van du/dt=Umax.Rf/2 với Rf là điện trở tải. Nếu giá trị này vượt quá giá trị cho phép của van thì lại tính lại từ đầu
-Tính công suât điện trở
Theo thực nghiệm được tính gần đúng:
PR = fy. C. U2ymax
CHƯƠNG 4
THIẾT KẾ MẠCH ĐIỀU KHIỂN
Sau khi thiết kế và tính toán mạch lực ta nhận thấy cần có một hệ thống đúng để điều khiển mạch lực nói trên. Mạch điều khiển này phải đáp ứng được nhu cầu cầnthực hiện của mạch điều khiển.
Có hai hệ điều khiển cơ bản là hệ đồng bộ và hệ không đồng bộ
– Hệ đồng bộ: Trong hệ này góc điều khiển mở, van a luôn được xác định xuất phát từ một thời điểm cố định của điện áp mạch lực. Vì vậy trong mạch điều khiển phải có một khâu thực hiện nhiệm vụ này gọi là khâu đồng bộ để đảm bảo mạch điều khiển hoạt động theo nhịp của điện áp lực.
– Hệ không đồng bộ: Trong hệ này a không xác định theo điện áp lực mà được tính dựa vào trạng thái của tải chỉnh lưu và góc điều khiển của lần phát xung mở van ngay trước đó. Do đó mạch điều khiển loại này không cần khâu điều khiển đồng bộ. Tuy nhiên để bộ chỉnh lưu hoạt động bình thường bắt buộc phải thực hiện điều khiển theo mạch vòng kín.
Hiện nay đại đa số các mạch chỉnh lưu điều khiển thực hiện theo sơ đồ đồng bộ vì khâu đồng bộ có ưu điểm hoạt động ổn định và dễ thực hiện.
4.1.Cấu trúc mạch điều khiển
4.1.1. Cấu trúc điều khiển ngang
- Sơ đồ
1 2 3 4
5
Trong đó: 1 – Khâu đồng bộ
2 – Khâu dịch pha
3 – Khâu tạo xung
4 – Khâu khuyếch đại xung
5 – Khâu tạo Uđk
Nguyên tắc điều khiển ngang.
Khâu đồng bộ thường tạo ra điện áp hình sin có góc lệch pha cố định so với điện áp lực. Khâu dịch pha có nhiệm vụ thay đổi góc pha của điện áp theo tác động của điện áp điều khiển. Xung điều khiển được tạo ra ở khâu tạo xung (TX) vào thời điểm khi điện áp dịch pha UDF qua điểm O. Xung này nhờ khâu khuyếch đại xung KĐX được tăng đủ công suất gửi tới cực điều khiển của van. Như vậy góc a hay thời điểm phát xung mở van thay đổi được nhờ sự tác động của Uđk làm điện áp UDF di chuyển theo chiều ngang của trục thời gian.
4.1.2 .Cấu trúc điều khiển dọc
- Sơ đồ cấu trúc
1 2 3 4
5
Trong đó: 1 – Khâu đồng bộ
2 – Khâu tạo Utựa
3 – Khâu tạo xung và so sánh
4 – Khâu khuyếch đại xung
5 – Khâu tạo Uđk
- Nguyên tắc điều khiển
Uđóng khâu đồng bộ thường tạo ra điện áp hình sin có góc lệch pha cố định so với điện áp lực. Khâu tạo UT tạo ra điện áp tựa có dạng cố định theo chu kỳ do nhịp đồng bộ của UĐB . Khâu so sánh xác định điểm cân bằng của hai điện áp UT và UĐK để phát động khâu tạo xung TX. Như vậy trong nguyên tắc này thời điểm phát xung mở van hay góc điều khiển thay đổi do sự thay đổi trị số của UĐK . Theo đồ thị đó là sự di chuyển dọc trục biên độ.
4.1.3. Chức năng điều khiển
– Phát xung điều khiển đến các van lực theo đúng pha và góc điều khiển a cần thiết.
– Đảm bảo phạm vi điều chỉnh góc amax + amin tương ứng với điện áp ra của tải mạch lực.
– Cho phép bộ chỉnh lưu làm việc bình thường với các chế độ khác nhau do tải yêu cầu như chế độ khởi động, chế độ nghịch lưu, chế độ dòng điện liên tục.
– Có độ đối xứng xung điều khiển tốt, không vượt quá 10 ¸ 30 điện tức là góc điều khiển với mọi van không được lệch quá giá trị cho phép.
– Đảm bảo mạch hoạt động ổn định và tin cậy khi lưới điện xoay chiều giao động cả về giá trị điện áp và tần số.
– Có khả năng chống nhiễu công nghiệp tốt.
– Độ tác động của mạch điều khiển nhanh, dưới 1ms.
– Thực hiện các yêu cầu về bảo vệ bộ chỉnh lưu từ há điều khiển nếu cần nên ngắt xung điều khiển khi sự cố, thông báo các hiện tượng không bình thường của lưới điện và bản thân bộ chỉnh lưu.
– Đảm bảo xung điều khiển phát tới các van lực để mở chắc chắn van, phải thoả mãn yêu cầu:
+ Đủ công suất
+ Có sườn xung đối xứng để mở van chính xác vao thời điểm quy định, thường tốc độ tăng áp điều khiển phải đạt 10V/ms tốc độ tăng điều khiển.
+ Độ rộng xung điều khiển đủ cho dòng qua van kịp vượt trị số dòng điện duy trì Idt của nó để khi ngắt van vẫn giữ được tràng thái dẫn.
+ Có dạng phù hợp với sơ đồ chỉnh lưu và tính chất tải.
4.1.4.Nguyên lý hoạt động
Tín hiệu xoay chiều sau khi đi qua biến áp nguồn được chỉnh lưu bởi 2 Điốt Đ1 và Đ2. Điện sau chỉnh lưu so sánh với điện áp chuẩn U0 để tạo tín hiệu đồng bộ trùng với thời điểm diện áp lưới đi qua điểm 0 . Khi tín hiệu đồng bộ âm tụ C được nạp và ngược lai khi tín hiệu đồng bộ dương tụ C phóng . Như vậy ở đầu ra của IC sẽ có tín hiệu răng cưa .Sau đó tín hiệu răng cưa được so sánh với tín hiệu điều khiển (Lấy từ khâu phản hồi tốc độ ) bằng khuếch đại thuật toán .
Bộ OA7 là một đa hài đợi dao động tạo xung chùm có tần số cao với mục đích giảm kích thứơc của máy biến áp xung .Tín hiệu cao tần trộn với tín hiệu sau khi so sánh rồi tiếp tục được trộn với tín hiệu phân phối nhằm tao ra tín hiêu cho từng Thyristo riêng biệt .Những tín hiệu này đựoc khuếch đại và thông qua biến áp xung đưa trực tiếp lên cực điều khiển của Thyristo .
Do yêu cầu của đề bài là dùng sơ đồ cầu 3 pha nên cần thiết kế 3 kênh tương tự nhau cho các pha A , B , C .
4.2 Sơ đồ mạch điều khiển
Hình 4.1 Sơ đồ mạch điều khiển
4.2.1.Dạng ổn áp điều khiển
Hình 4.2 Giản đồ mạch điều khiển
4.3.Tính toán mạch điều khiển
4.3.1. Tính toán khâu đồng pha.
- Nguyên lý hoạt động
Hình 4.3 sơ đồ khâu đồng pha
- Giản đồ điện áp
Hình 4.4 Giản đồ điện áp
Điện áp xoay chiều 220v được đưa qua mạch chỉnh lưu một pha hai nửa chu kỳ.
Nửa chu kỳ đầu U2 >0 và U2‘ Þ Đ1 dẫn.
Nửa chu ký sau U2 <0 và U2‘ >0 Þ Đ2 dẫn. Ta được điệnn áp UI như hình vẽ. U được đưa vào cực thuận của OP1. Điều chỉnh Rx1 để được điện áp U0 đưa vào cửa đảo.
Nếu UI <U0 thì UII < 0 và bằng -(E – 2)v
Nếu UI > U0 thì UII > 0 và bằng (E – 2)v
Điện áp ra UII là dạng xung chữ nhật
Điện áp xoay chiều 220v được đưa qua mạch chỉnh lưu một pha hai nửa chu kỳ.
Nửa chu kỳ đầu U2 >0 và U2‘ Þ Đ1 dẫn.
Nửa chu ký sau U2 <0 và U2‘ >0 Þ Đ2 dẫn. Ta được điệnn áp UI như hình vẽ. U được đưa vào cực thuận của OP1. Điều chỉnh Rx1 để được điện áp U0 đưa vào cửa đảo.
Nếu UI <U0 thì UII < 0 và bằng -(E – 2)v
Nếu UI > U0 thì UII > 0 và bằng (E – 2)v
Điện áp ra UII là dạng xung chữ nhật
- c) Tính toán
– Chọn 1=3o -> Uref=12sin1=12. .sin3o= 0,84 (V)
Ta có I==
ó =
=>12R3 = 11,16R3 +11,16R4
=>0,84R3 = 11,16R4
=>R3 = 13,2 R4
-Tính R1: Chọn R3=13 K -> R4=1 K
Chọn I = 10mA ; U=E= 12V
->R1= U/I=12/10.10-3 = 1,2 K
Chọn R2=5 K
Chọn D1 và D2 là loại D-1001 với I= 1 (A); Ungmax= 200 (V); khuếch đai thuật toán A741 8 chân
Chân 1 : chân bù
Chân 2 : chân vào không đảo
Chân 3 : chân vào đảo
Chân 4 : chân nguồn nuôI (-)
Chân 5 : chân bù
Chân 6 : chân ra
Chân 7 : chân nguồn nuôi (+)
Chân 8 : chân bù
Các thông số của nhà sản xuất của A741 là:
Ungmax = 322 (V)
Unf = 15 V
Udf = 30V
K0 = 5.106
P1 = 100 W
J = 55o125oC
Ira = 25 mA
En = 15 V
Zra = 60
Zvào = 300 K
du/dt = 0,5 V
4.3.2. Khâu tạo điện áp răng cưa
- a) Sơ đồ và nguyên lý hoạt động
Hình 4.5 Sơ đồ khâu răng cưa
Hình 4.6 giản đồ răng cưa
* Khi UII < 0 thì D3 dẫn, áp ở cửa đảo của OA2 âm U– < 0
nên UIII = k0 ( U+– U–) > 0 Þ điện áp ra ở cửa ra của OA là bão hoà dương.
Chọn R3 << Rx2 để bỏ qua iR trong giai đoạn này . Dòng qua tụ là dòng iRvì dòng vào cửa âm của OA không đáng kể
Điện áp ra bằng điện áp tụ C và bằng:
UIII = UC =
Như vậy điện áp trên tụ C tăng trưởngtuyến tính khi điện áp này đạt tụ rò ngưỡng Dz thì thông và giữ ở điện áp này (Nếu không có Dz thì điện áp tăng Ubh )
* Khi UII > 0 thì D3 khoá Þ iR = 0 lúc này dòng đi qua tụ C là dòng đi qua Rx2 , dòng điện này ngược chiều với dòng đi qua tụ C khi UII < 0 nghĩa là nó phóng điện.
UIII = UC = UOA12 –
- b) Tính toán
Ta có: T= = = 200 ms
Do đó nửa chu kỳ đầu tạo điện áp răng cưa sao cho :
Trc = = 10 ms =tn + tf
tn + tf = 180o
Trong đó : tn: thời gian tụ nạp
tf: thời gian tụ phóng
tn= 174o -> Trc = = 9.46 (ms)
tf=6o -> Trc = = 0,33 (ms)
-Khi C1 nạp tức dòng đi qua R5, khi đó Ur5>Udb.
Vì Uc Udb = 12 V; chọn C = 0,5 F
- 12 = .9,64.10-3
- R5 = .10-3 = 19,34.10-3 ()
Chọn R5 = 20 K
-Khi C2 phóng tức thời thì Udb>Ur5
- Uc(t)=Udb – =Udb – .0,33.10-3
Trong thời gian tụ phóng thì tụ Uc phải phóng bằng giá trị ổn áp nên:
12 =. 0,33.10-3
R6= 0,66.10-3 ()
4.3. 3. Khâu so sánh.
a)Sơ đồ và nguyên lý hoạt động
Hình 4.7 sơ đồ khâu so sánh
Hình 4.8 Giản đồ khâu so sánh
Điện áp răng cưa U3 được đưa vào cửa đảo của OA3, còn điện áp điều khiển Uđk được đưa vào cửa không đảo. Khi đó điện áp ra là:
U4 = K0(Uđk – U3).
Do đó khi Uđk > U3 thì điện áp ra là dương bão hoà, còn khi Uđk < U3 thì điện áp ra U4 là dương bão hoà.
Điôt D5 để lọc phần âm của điện áp U4, do đó U5 chỉ lấy phần điện áp dương
- b) Tính toán
Vì dòng vào khuếch đại thuật toán rất nhỏ nên ta chọn R7= R8= R9= R10=R15=10
Chọn khuếch đại thuật toán A741
4.3.4 . Khâu phát xung chùm
- a) Sơ đồ và nguyên lý hoạt động
Hình 4.10 Sơ đồ khâu phát xung chùm
Hình 4.11 Giản đồ khâu phát xung chùm
Tại thời điểm mà điện áp trên tụ UC2 = 0 thì Ur = 0 vì Ur == un= uC = 0
Ta tiến hành nạp cho tụ C2 một điện áp UC2 < 0 . Khi đó UP – UN =UP – UC > 0 Þ Ur =Urmax , khi đó thì tụ điện C dược nạo điện theo chiều ngược lại so với chiều mà ta nạp cho C2 lúc ban đầu .Tụ C2 được nạp tới giá trị :
UC2 = UP = Khi Ur= 0 thì Up = 0 .Do đó C2 phóng điện qua R10 về âm nguồn của OA4 và điện áp ra của OA4 ở mức âm bão hoà . Quá trình nạy lặp lại làm đầu ra của OA4 có xung điện áp dạng chữ nhật với tần số tuỳ thuộc vào giá trị của R10 và C2 .
- b) Tính toán
Chu kỳ của xung chùm được xác định theo công thức
T= 2.R1.R2.C2.ln.
Chọn R12= R13=10 K
=> T= 2.R11 .C2. 0,69 = 1,4 R11.C2
Chọn f= 10 Khz
C2= 0,1 F
Vì khi phóng và nạp cho tụ C2 thì sòng đều chạy qua R11 nên thời gian phóng: T2=T1= .T
Vậy biểu thức chu kỳ là : T= T1+T2= 1,4.R11.C2
Có T=1/f = 1/10.10-3 = 10-4
=> R11=R14= T.10-4 /1,4.0,1.10-6 = 714 ()
4.3.5 . Khâu khuếch đại xung và biến áp xung
a)Sơ đồ và nguyên lý hoạt động
Hình 4.13 sơ đồ khâu biến áp và khuyêchs đại xung
Nguyên lý làm việc :
– Khi có xung vào các bóng T1 mở , đưa xung tới biến áp xung rồi tạo xung mở Thyristo .
+ Vì biến áp xung có tính chất vi phân nên phải có điện trở R2 để tiêu tám năng lượng tích luỹ của các cuộn dây trong giai đoạn T1 , T2 khoá .Nếu không biên độ của các xung sẽ giảm đi đáng kể do điểm làm việc của lõi biến áp đẩy lên phía bão hoà .
+ Do R2 mắc nối tiếp với cuộn sơ cấp của máy biến áp xung nên làm giảm điện áp đặt lên biến áp xung , để giữ điện áp ban đầu trên máy biến áp bằng nguồn Ecs ta thêm tụ C vào D1 có tác dụng ngăn mạch biến áp xung khi T1 khoá
D2 nhằm chống quá áp gây hỏng bóng .
- b) Tính toán
-Biến áp xung có nhiệm vụ tách ly mạch lực và mạch điều khiển
Phối hợp trở kháng giữa tầng khuếch đại xung và cực điều khiển van lực.
Dễ thay đổi cực tính của xung ra.
Tạo biên độ xung theo yêu cầu
Chọn van thyritor loại : T46N600COC
Với Ug= 2,5 V
Ig= 150 (mA)
Biến áp xung chọn loại có tỷ số biến: m=U1/U2=1,2
Điện áp thứ cấp biến áp xung : U2=Ug=2,5 (V)
Điện áp sơ cấp : U1=m.U2= 3 (V)
I1=Ig/1,2=150/1,2= 125 (mA)
Có tỉ lệ biến áp xung là: 1,2
Chọn vật liệu rất từ là Ferit, lõi sắt có dạng hình chữ U làm việc trên 1 phần của đặc tính của đặc tính từ hóa.
=0,7 (T); =50A/m
Thể tích lõi Fe :
Trong đó: Tx: độ xung : tx=350s
Ux: mức sụt áp cho phép : Ux=0,2
U2: điện áp sơ cấp biến áp xung
I2: dòng sơ cấp biến áp xung I2=Ig
Kba=2
=1,8.10—6 (m3)
Chọn S=1 cm2
h= 2 cm
=>S=d2/4 => ==1,1 (cm2)
Số vòng cuộn sơ cấp biến áp xung
W1===7,5 vòng
Số vòng cuộn sơ cấp biến áp xung
W2==6,25 vòng
Tiết diện và đường kính của cuộn dây sơ cấp biến áp xung
Chọn mật độ dòng điện :J1=J2=J3=J=2(A/mm2)
S1===0,0625 (mm2)
d1==0,26 (mm)
Tiết diện và đường kính của cuộn thứ biến áp xung
S2==0,075 (mm2)
d2==0,3 (mm)
-Tính R3:
R3===76
-> chọn bóng T là 2N2369A
Ta có thông sô của nhà sản xuât bang 2N2369A là:
Ic=0,2 (A)
Uc=15 (V)
=50
ft= 500 MHz
-Tính chọn R1,R2
Vì R1,R2 là điện trở hạn chế dòng vào cực T
Ta có:<R1=R2<
75<R1<
75<R1< 80
Chọn R1=R2=78
Ta chọn D1,D2,D3,Dz là loại điốt: B3-320
4.3.6 Khâu tách xung
a.Sơ đồ:
Hình 4.14 Sơ đồ khâu tách xung
b.giản đồ:
Hình 4.15 Giản đồ khâu tách xung
- Nguyên lý hoạt động:
– ở mỗi chu kỳ thì mạch khuếch đại thuật toán chỉ cho một pha đi qua.vì vậy tạo ra sụ tách xung.
- Tính toán:
– vì dòng điện qua mạch khuếch đại thuật toán là rất nhỏ nên ta chọn R16 = 10k ,chọn mạch khuếch đại thuật toán là A741. Chọn R17 = 10 k.
4.3.7 Khâu tạo nguồn nuôi
- sơ đồ:
Hình 4.16 Sơ đồ tạo nguồn nuôi
Dòng điện đầu ra: IRa = 0 ¸1(A)
Tụ điện C4, C5 lọc các thành phần bậc cao
Chọn C4 = C5 = C6 = C7 = 470(mF), U = 24(V)
Ta cần tạo ra nguồn điện áp để cấp cho máy biến áp xung và nuôi IC, các bộ điều chỉnh dòng điện, tốc độ và điện áp đặt tốc độ.
Ta chọn mạch chỉnh lưu cầu dùng điôt, điện áp thứ cấp máy biến áp nguồn nuôi:
U2 = . Chọn U2 = 30(V)
Để ổn định điện áp ra của nguồn nuôi, ta dùng hai vi mạch ổn áp 7815 và 7915 là vi mạch ổn áp cho ta điện áp -15(V).
Các thông số của vi mạch:
Điện áp đầu vào: UV = 24 ¸ 30V
Điện áp đầu ra: UR = 15V với IC7815
UR = -15V với IC7915
4.3.8 Khâu phản hồi tốc độ:
Khi thiết kế hệ điều chỉnh tự động truyền động điện cần phải đảm bảo hệ thực hiện được các yêu cầu đươc đặt ra đó la yêu cầu công nghệ các chỉ tiêu chất lượng và các yêu cầu về kinh tế.
Độ ổn định và độ chính xác điều chỉnh là hai chỉ tiêu kỹ thuật quan trọng bậc nhất của hệ thống tự động. Độ chính xác được đánh giá trên cơ sở phân tích các sai lệch điều chỉnh , các sai lệch này phụ thuộc rất nhiều yếu tố.Sự biến thiên của các tín hiệu đặt gây ra các sai lệch không thể tránh được trong quá trình quá độ và cũng có thể sai lệch trong quá trình xác lập. Trên cơ sở phân tích các sai lệch điều chỉnh ta có thể chọn được các bộ điều chỉnh ta có thể chọn được các bộ điều chỉnh ,các mạch bù thích hợp để nâng cao độ chính xác của hệ thống.
Để đạt được nhưng chỉ tiêu về công nghệ trong điều chỉnh tự động điều chỉnh hệ thống truyền động động cơ 1 chiều ta sử dụng mạch vòng diều chỉnh , tổng hợp mạch vòng tốc độ.
Hệ thống điều chỉnh tốc độ là hệ thống mà đại lượng được điều chỉnh là tốc độ góc của động cơ điện, các hệ này thường được sủ dụng trong thực tế kỹ thuật.Hệ điều chỉnh tốc độ được hình thành từ hệ thống điều chỉnh dòng điện.
Tải xuống tài liệu học tập PDF miễn phí
Tải Xuống Tại Đây
Tải xuống tài liệu học tập PDF miễn phí
[sociallocker id=”19555″]
Tải Xuống Tại Đây [/sociallocker]